Torque control under Real sensorless vector control and vector control
212
PARAMETERS
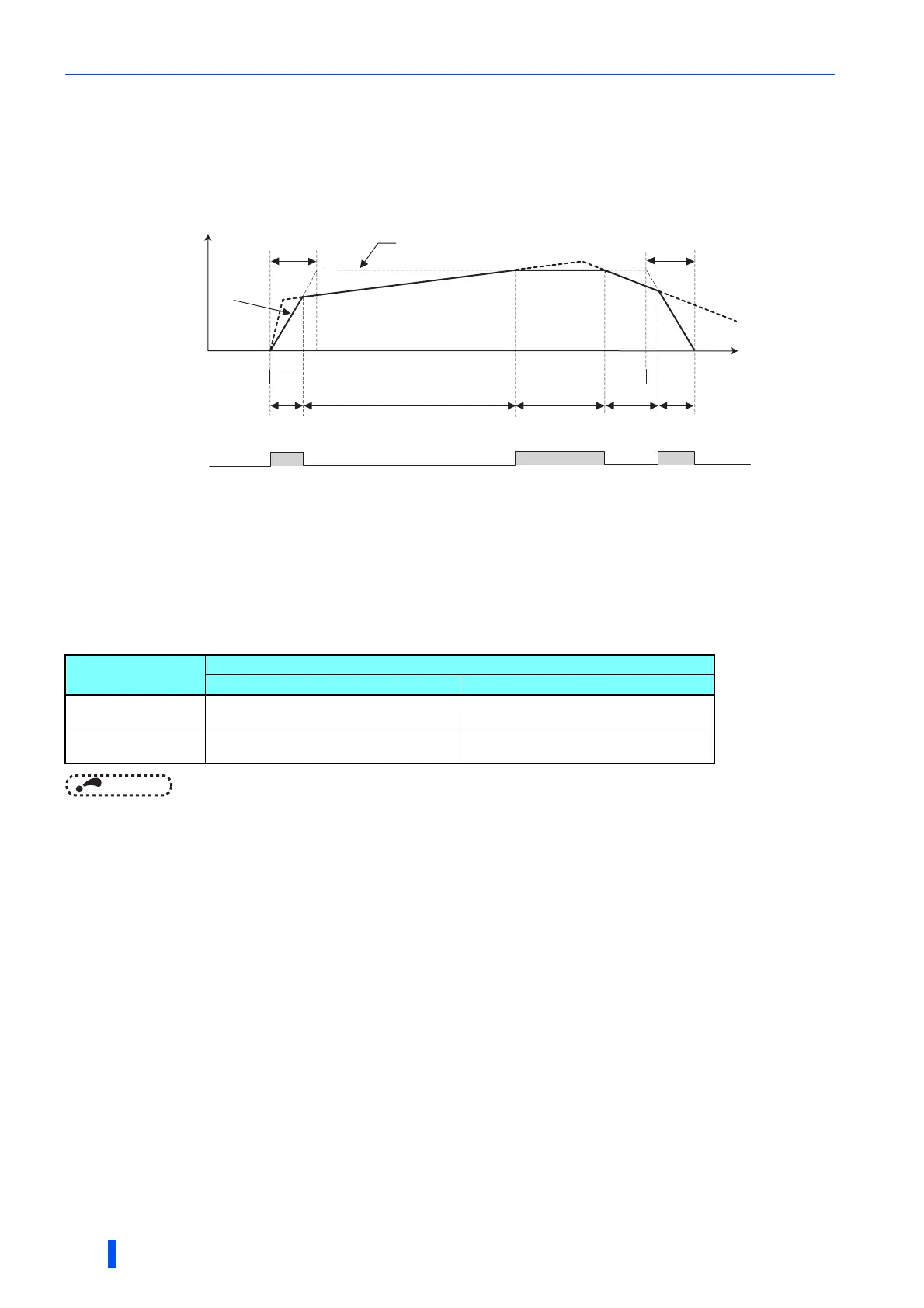
Operation example (when Pr.804="0")
Torque control is possible when actual rotation speed does not exceed the speed limit value.
When the actual speed reaches or exceeds the speed limit value, speed limit is activated, torque control is stopped and speed
control (proportional control) is performed.
The following diagram indicates operation relative to analog input command from the terminal 1.
1) At STF signal ON, the speed limit value is raised in accordance with the setting of Pr.7.
2) Speed control is performed when the actual speed exceeds the speed limit value.
3) At STF signal OFF, the speed limit value is lowered in accordance with the setting of Pr.8.
4) Under torque control, the actual operation speed is a constant speed when the torque command and load torque are
balanced.
5) The direction of motor torque generation is determined by a combination of the input torque command polarity and the
start signal, as given in the following table.
NOTE
• Once the speed limit is activated, speed control is performed and internal torque limit (Pr.22 Torque limit level) is enabled.
(Initial value) In this case, it may not be possible to return to torque control.
Torque limit should be external torque limit (terminals 1 and 4). (Refer to page 185.)
• Under torque control, the undervoltage avoidance function (Pr.261="11" or "12"), which is one of the power failure
deceleration stop function, is invalid.
When Pr.261="11 (12)", the operation is performed in the same manner as if Pr.261="1 (2)".
• Under torque control, perform linear acceleration/deceleration (Pr.29="0 (initial value)"). The inverter's protective function
may operate for non-linear acceleration/deceleration patterns. (Refer to page 290.)
• Performing pre-excitation (LX signal and X13 signal) under torque control (Real sensorless vector control) may start the
motor running at a low speed even when the start command (STF or STR) is not input The motor may run also at a low speed
when the speed limit value=0 with a start command input. It must be confirmed that the motor running will not cause any
safety problem before performing pre-excitation.
Polarity of torque
command
Torque generation direction
STF signal ON STR signal ON
+ torque command
Forward direction (forward power driving /
reverse regenerative driving)
Reverse direction (forward regenerative
driving / reverse power driving)
- torque command
Reverse direction (forward regenerative
driving / reverse power driving)
Forward direction (forward power driving /
reverse regenerative driving)
STF
(Forward
rotation
command)
Pr.7
Speed limit value
Time
Speed
Speed
Speed
Torque
control
operation
Torque control operation
Pr.8
Speed limit
operation
(Speed control)
Speed limit
operation
(Speed control)
Speed limit
operation
(Speed control)
∗
∗
∗
∗When the speed limit activates, torque according to the commanded is not developed.
OL
ON
ON ON

 Loading...
Loading...






