BCN-C22005-696
FR-A800 Series
Instruction Manual Supplement
1 Second droop control
NOTE
• The RT signal is a second function selection signal. The RT signal also enables other second functions.
• The RT signal is assigned to the terminal RT in the initial status. Set "3" in any of Pr.178 to Pr.189 (input terminal
function selection) to assign the RT signal to another terminal.
• Changing the terminal assignment using Pr.178 to Pr.189 (input terminal function selection) may affect the
other functions. Set parameters after confirming the function of each terminal.
• For the details of the droop control operation, refer to page 628 of the Instruction Manual (Detailed).
• The second droop control is added.
• Use the second droop control if the droop control setting needs to be switched according to application or if
multiple motors are switched by a single inverter.
• Turning ON the RT signal enables the second droop control.
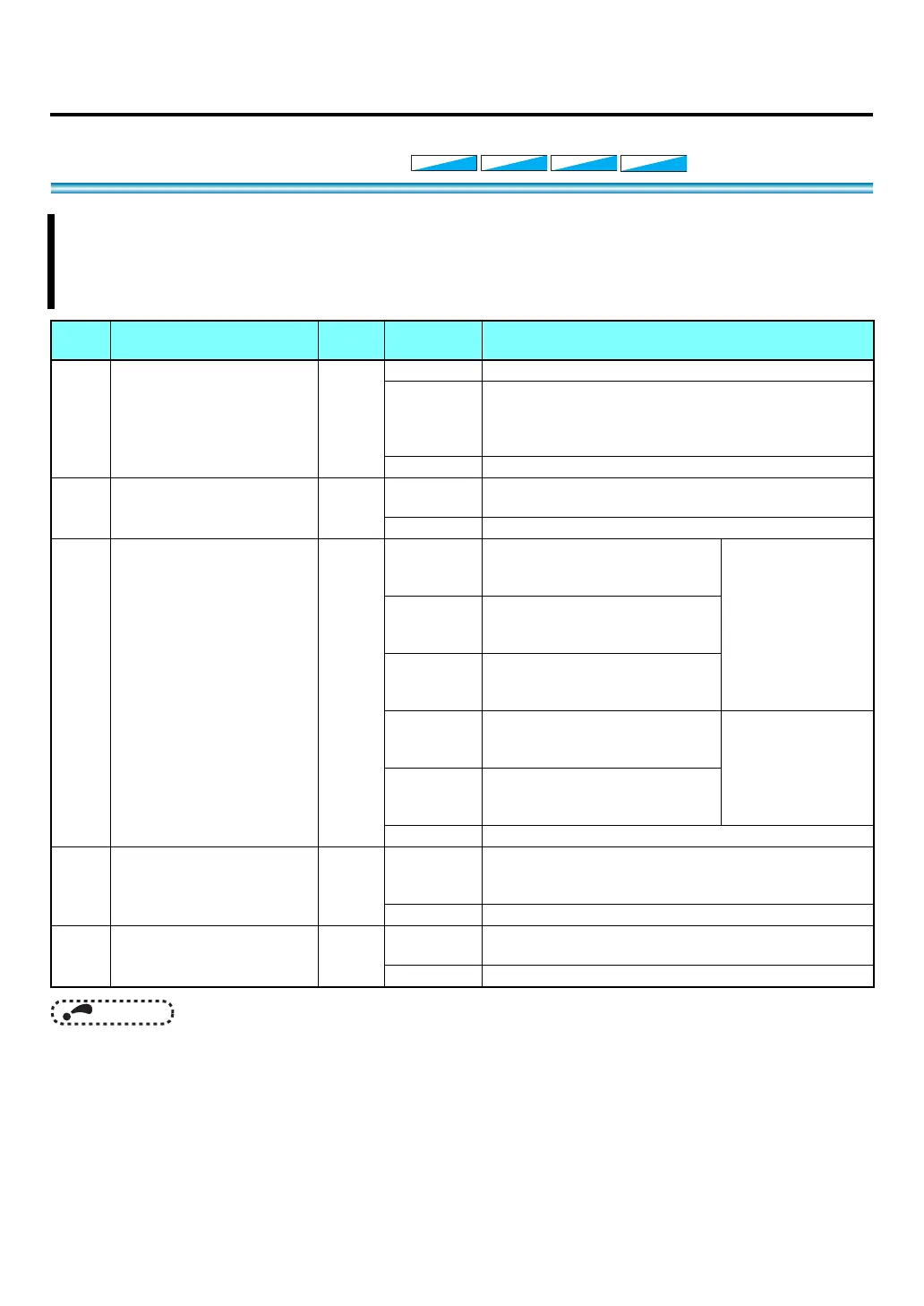
Pr. Name
Initial
value
Setting
range
Description
679
G420
Second droop gain
9999
0 Normal operation
0.1% to
100%
Droop control enabled.
Set the droop gain when RT signal is ON.
Set the droop amount at the time of rated torque as % value
of the rated motor frequency.
9999 Same as the first droop control setting.
680
G421
Second droop filter time
constant
9999
0 to 1 s
Set the droop filter time constant when RT signal is ON.
Set the filter time constant to apply to the current for torque.
9999 Same as the first droop control setting.
681
G422
Second droop function
activation selection
9999
0
Without droop control during
acceleration/deceleration when RT
signal is ON (With 0 limit)
Rated motor
frequency is the
droop compensation
reference.
1
Constant droop control during
operation when RT signal is ON
(With 0 limit)
2
Constant droop control during
operation when RT signal is ON
(Without 0 limit)
10
Without droop control during
acceleration/deceleration when RT
signal is ON (With 0 limit)
Motor speed is the
droop compensation
reference.
11
Constant droop control during
operation when RT signal is ON
(With 0 limit)
9999 Same as the first droop control setting.
682
G423
Second droop break
point gain
9999
0.1 to 100%
Set the break point gain when RT signal is ON.
Set the droop amount to be changed as % value of the
rated motor frequency.
9999 Same as the first droop control setting.
683
G424
Second droop break
point torque
9999
0.1 to 100%
Set the break point torque when RT signal is ON.
Set the torque to change the droop amount.
9999 Same as the first droop control setting.
Magnetic fluxMagnetic fluxMagnetic flux
SensorlessSensorlessSensorless

 Loading...
Loading...






