Position control under vector control and PM sensorless vector control
228
PARAMETERS
5.5 Position control under vector control and
PM sensorless vector control
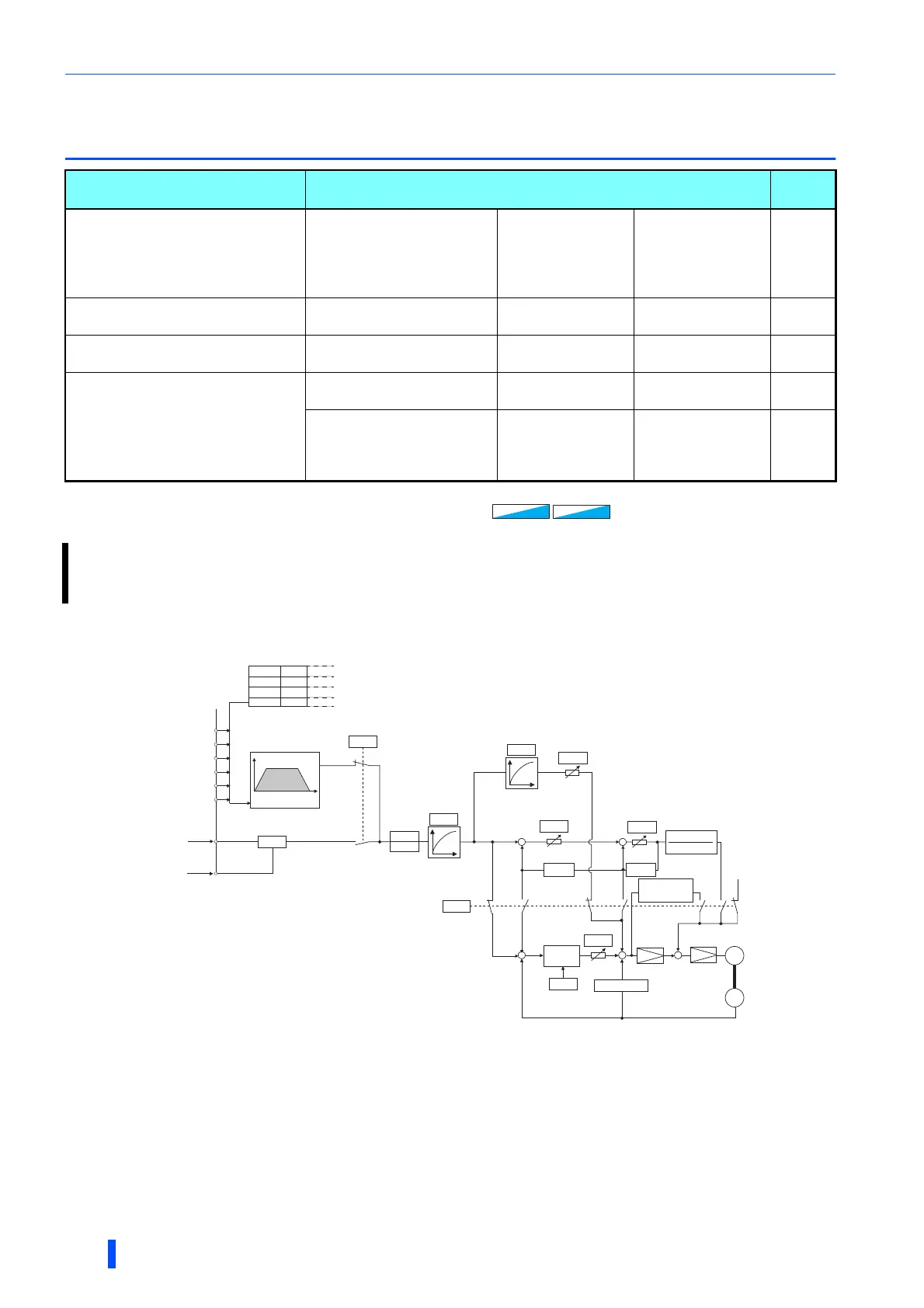
5.5.1 About position control
Control block diagram
Purpose Parameter to set
Refer to
page
To perform Simple position
control by setting parameters
To give parameter position
command
P.B000,
P.B020 to P.B050,
P.B101,
P.B120 to P.B188,
P.B190 to P.B195
Pr.419,
Pr.464 to Pr.494,
Pr.1221 to Pr.1290,
Pr.1292, Pr.1293
232
To perform position control by
pulse input to the inverter
Simple pulse train position
command
P.B000,
P. B 0 0 9 t o P. B 0 11
Pr.419,
Pr.428 to Pr.430
244
To adjust the gear ratio of the
motor and machine
Electronic gear settings
P.B001, P.B002
and P.B005
Pr.420, Pr.421 and
Pr.424
247
To improve the precision of the
position control
Setting the position
adjustment parameters
P.B007, P.B008,
P.B192 to P.B195
Pr.426, Pr.427,
Pr.1294 to Pr.1297
249
Position control gain
adjustment
P.B003, P.B004,
P.B006, P.B012,
P.G220, P.G224,
P. C11 4
Pr.422, Pr.423,
Pr.425, Pr.446,
Pr.828, Pr.877,
Pr.880
251
• In position control, speed commands, which are calculated to eliminate the difference between the command pulse
(parameter setting) and the estimated feedback pulse, are output to rotate the motor.
• This inverter can perform simple positioning by contact input or position control by simple pulse input to the inverter.
Vector
Vector
PM
PM
0
Pr.419
Pr.420
Pr.421
Pr.424
Pr.425
Pr.423
Pr.422
M
Pr.429
Pr.428
2
Pr.877
0,1
Model position
control gain
J
Torque coefficient
Toruque
control
+
+
+
+
+
+
-
-
-
-
+
integral
Pr.446
Model speed
control gain
Pr.828
Speed feed
forward gain
0,122
210
0
Encoder
integral
Command pulse
Pulse train sign
JOG
NP
RH
RM
RL
REX
STF
STR
Pr.4 to 6, Pr.24 to Pr.27,
Pr.232 to Pr.239
Pr.465 to Pr.494
Pr.1222 to Pr.1281
Point table
Electronic
gear
Multi-speed,
communication
Position command
source selection
Command pulse selection
Position command
acceleration/deceleration
time constant
Position
loop gain
Clear signal
selection
Differentiation
Position feedback
(estimated value under PM sensorless vector control)
Deviation
counter
Speed control
Position feed
forward
command filter
Position feed
forward gain
Travel
distance
Position Speed Acceleration/deceleration time

 Loading...
Loading...






