Speed control under Real sensorless vector control, vector control, PM sensorless vector
control
206
PARAMETERS
5.3.9 Avoiding motor overrunning
This is the overspeed detection frequency under encoder feedback control. (Refer to page 626.)
These parameters are available when FR-A8AP (option) is installed.
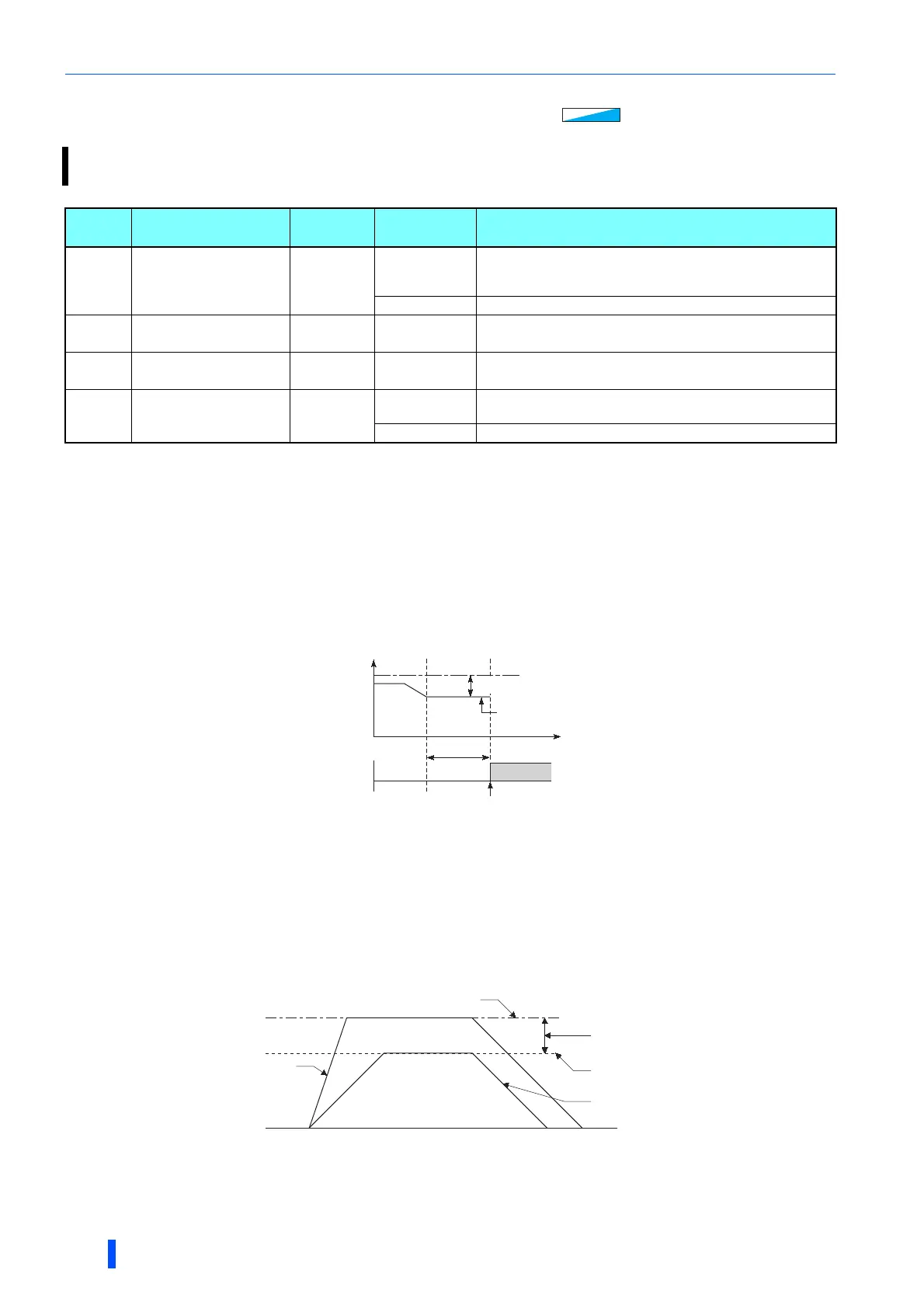
Speed deviation excess detection (Pr.285, Pr.853)
• A trip can be set for when the deviation between the set frequency and actual rotation speed is large, such as when the
load torque is excessive.
• When the difference (absolute value) between the speed command value and actual rotation speed in speed control under
vector control is equal to higher than the setting value in Pr.285 Speed deviation excess detection frequency for a
continuous time equal to or longer than the setting value in Pr.853 Speed deviation time, Speed deviation excess
detection (E.OSD) activates to shut off the inverter output.
Speed limit (Pr.873)
• This function prevents overrunning even when the setting value for the number of encoder pulses and the value of the
actual number of pulses are different. When the setting value for the number of encoder pulses is lower than the actual
number of pulses, because the motor may increase speed, the output frequency is limited with the frequency of (set
frequency + Pr.873).
Motor overrunning due to excessive load torque or an error in the setting of the number of encoder pulses can be
avoided.
Pr. Name
Initial
value
Setting range Description
285
H416
Speed deviation
excess detection
frequency
9999
0 to 30 Hz
Set the speed deviation excess detection frequency (difference
between the actual rotation speed and speed command value)
at which the protective function (E.OSD) activates.
9999 No speed deviation excess
853
H417
Speed deviation time
1 s 0 to 100 s
Set the time from when the speed deviation excess state is
entered to when the protective function (E.OSD) activates.
873
H415
Speed limit
20 Hz 0 to 400 Hz Set the frequency limit with the set frequency + Pr.873 value.
690
H881
Deceleration check
time
1 s
0 to 3600 s
Set the time required to shut off output due to deceleration
check after the start signal is OFF.
9999 No deceleration check
Vector
Vector
Set frequency
Actual speed
Time
Speed deviation
excessive fault activated
(E. OSD)
ONOFF
Fault output
(ALM)
Pr.853
Pr.285
Frequency
(Hz)
ctual speed
at error occurrence
Set speed + Pr. 873 value
Value of Pr. 873
Set speed
Speed during
normal operation

 Loading...
Loading...






