BCN-C22005-696
NOTE
•Use Pr.290 Monitor negative output selection to set the availability of values with minus signs (for terminal AM,
operation panels, communication options). For the details, refer to page 368 of the Instruction Manual (Detailed).
5 Compatibility with the FR-A8TP
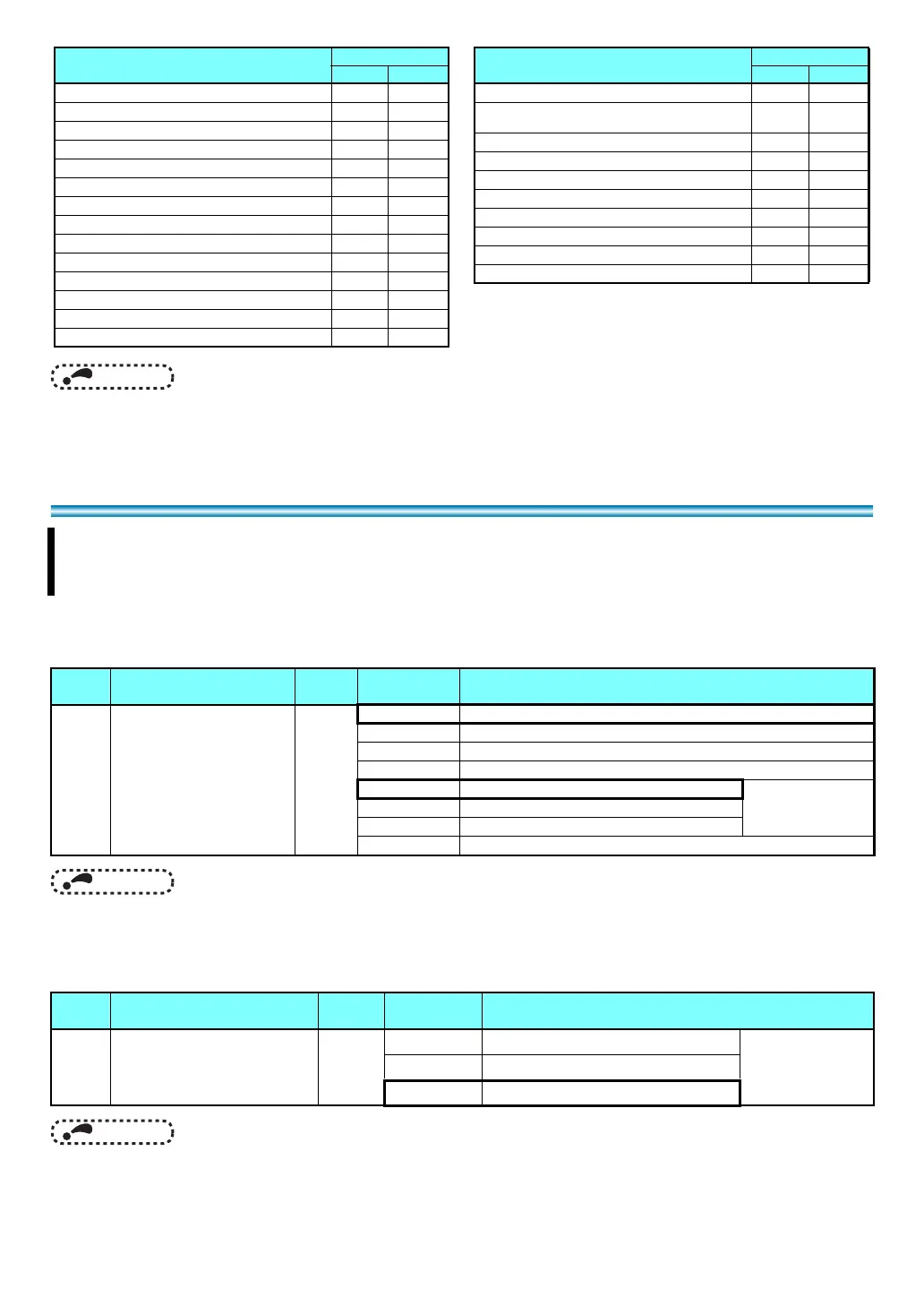
Selection of control method and control mode(Pr.451)
• The vector control can be selected for the second motor.
NOTE
• For the details of the control method and the control mode, refer to page 164 of the Instruction Manual (Detailed).
Secondmotoronlineautotuning(Pr.574)
• The magnetic flux observer can be selected for the second motor online auto tuning.
NOTE
• For the details of the online auto tuning, refer to page 460 of the Instruction Manual (Detailed).
• The control terminal option FR-A8TP can be used.
• When the FR-A8TP is connected, a motor with encoder can be operated under vector control. When both the
FR-A8AP and the FR-A8TP are used, the second motor can be operated under vector control.
Pr. Name
Initial
value
Setting
range
Description
451
G300
Second motor control
method selection
9999
0 to 6 Vector control
10 to 12 Real sensorless vector control
13, 14 PM sensorless vector control
20 V/F control (Advanced magnetic flux vector control)
100 to 106 Vector control
Fast-response
operation
110 to 112 Real sensorless vector control
110, 113, 114 PM sensorless vector control
9999 The setting value of Pr.800 Control method selection is used.
Pr. Name
Initial
value
Setting
range
Description
574
C211
Second motor online
auto tuning
0
0 Do not perform online auto tuning.
Select online auto
tuning for the
second motor.
1 Perform online auto tuning at startup.
2 Magnetic flux observer (tuning always)
: Displayed with minus sign,
—: Displayed without minus sign (positive only)
Types of Monitor
Pr.1018 setting
9999 0
Output frequency —
Running speed —
Motor torque
Position command (lower)
Position command (upper)
Current position (lower)
Current position (upper)
Droop pulse (lower)
Droop pulse (upper)
Torque command
Torque current command
PID deviation
Cumulative pulse
Cumulative pulse carrying-over times
Cumulative pulse (control terminal option)
Cumulative pulse carrying-over times (control
terminal option)
Remote output 1
Remote output 2
Remote output 3
Remote output 4
PID manipulated amount
Second PID deviation
Second PID manipulated amount
Control circuit temperature
Types of Monitor
Pr.1018 setting
9999 0

 Loading...
Loading...






