Position control under vector control and PM sensorless vector control
242
PARAMETERS
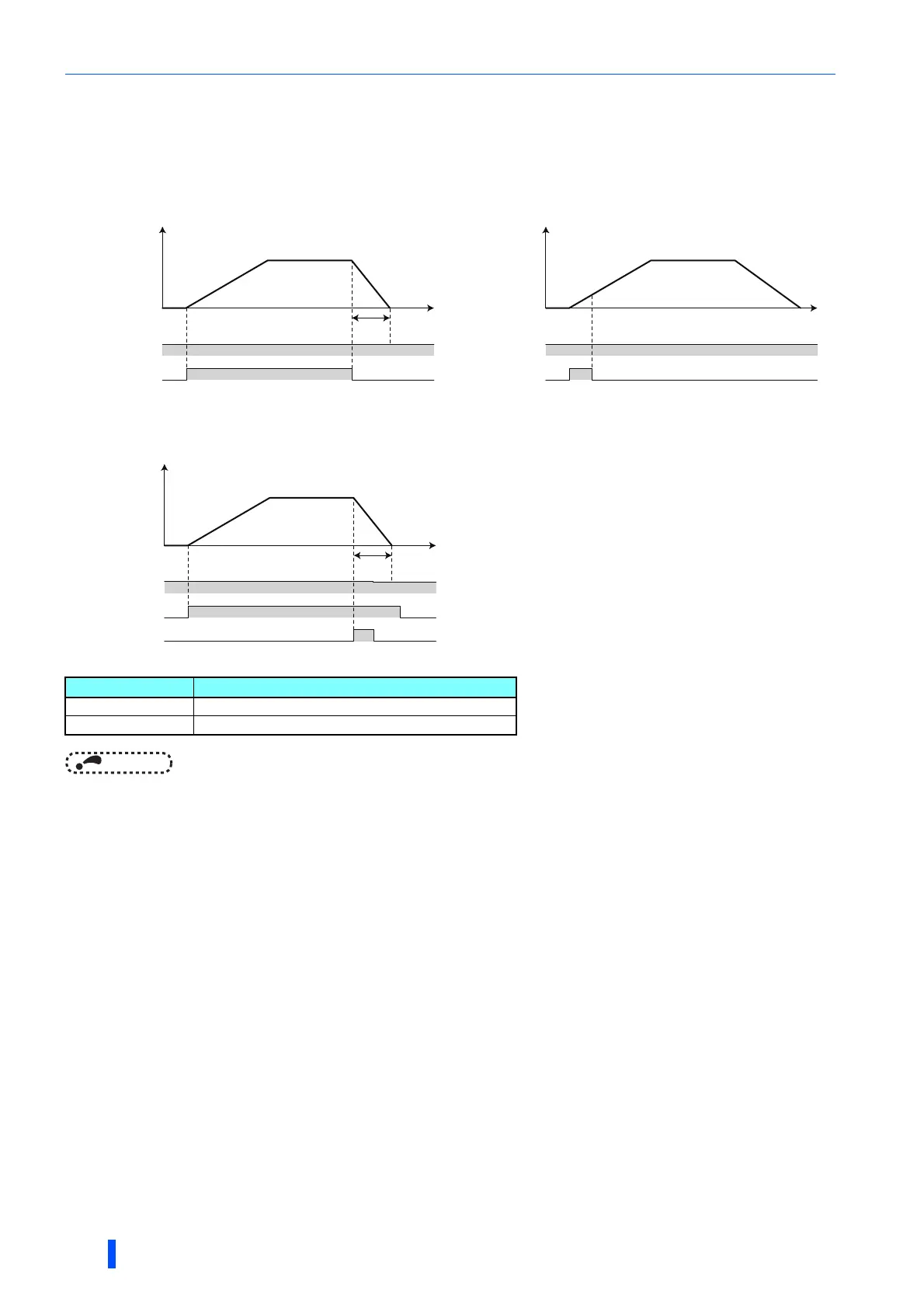
Sudden stop (Pr.464, Pr.1221 and X87 signal)
• The operation performed during STF(STR)-OFF can be selected with Pr.1221 Start command edge detection selection.
• If STF(STR) is turned OFF during positioning or home position returning when Pr.1221="0 (initial value)" is set, it stops in
the time set as Pr.464 Digital position control sudden stop deceleration time.
• Turning ON the Sudden stop signal (X87) during positioning operation or home position return operation, the motor stops in
the setting time of Pr.464. For the X87 signal, set "87" in any of Pr.178 to Pr.189 (input terminal function selection) to
assign the function to a terminal.
• The input logic of the X87 signal can be set using Pr.1292 Position control terminal input selection.
NOTE
• When deceleration time longer than the normal deceleration time (including Pr.1223) is set in Pr.464, the normal deceleration
time is applied to stop.
• The X87 signal is effective during position control JOG operation.
Pr.1292 setting Input logic (X87)
0 (initial value) Normally open input (NO contact input specification)
1 Normally closed input (NC contact input specification)
0
Time
Position command
speed
STF
ON
Servo ON
(LX)
Pr.464
ON
When Pr.1221="0 (initial value)" is set
0
Time
Position command
speed
STF
ON
Servo ON
(LX)
ON
When Pr.1221="1" is set
0
Time
Position command
speed
STF
ON
Servo ON
(LX)
Pr.464
ON
X87
ON

 Loading...
Loading...






