(G) Control parameters
628
PARAMETERS
5.16.15 Droop control
Droop control
• Droop control is enabled for Advanced magnetic flux vector control, Real sensorless vector control, vector control, and PM
sensorless vector control.
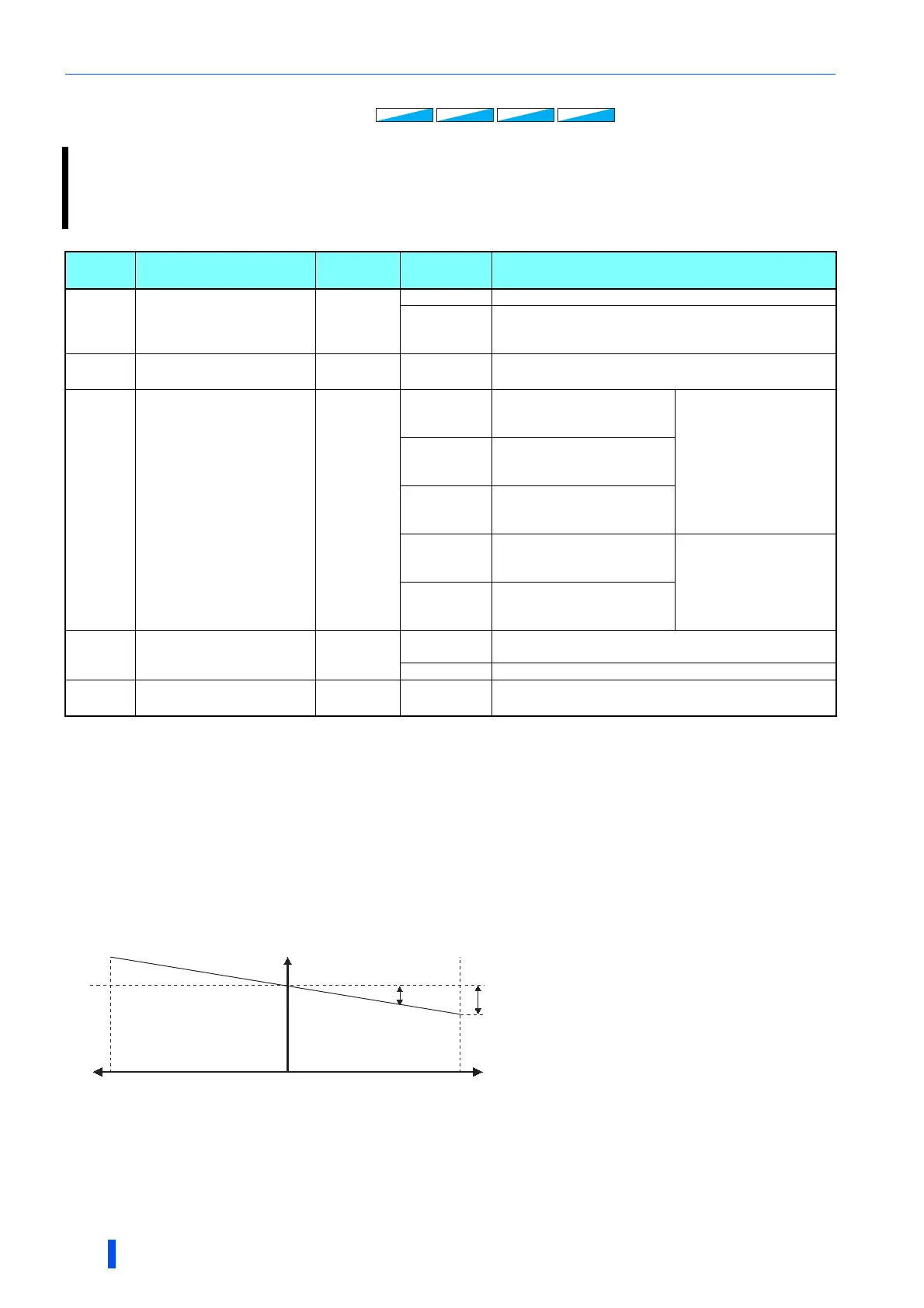
• Output frequency will change depending on the size of the current for torque with the droop control.
Set % of the droop amount of rated torque with rated frequency (motor speed in case of Pr.288 = "10, 11") as a reference
for the droop gain.
• Upper limit of the droop compensation frequency is smaller frequency between 400 Hz and Pr.1 Maximum frequency.
• During PM sensorless vector control, the lowest frequency among 400 Hz, Pr.1, and maximum motor frequency becomes
the upper limit droop compensation frequency.
This is a function to give droop characteristics to the speed by balancing the load in proportion with the load torque
during the Advanced magnetic flux vector control, Real sensorless vector control, vector control, and PM sensorless
vector control.
This is effective when balancing the load when using multiple inverters.
Pr. Name
Initial
value
Setting
range
Description
286
G400
Droop gain
0%
0 Normal operation
0.1% to 100%
Droop control enabled
Set the droop amount at the time of rated torque as % value
of the rated motor frequency.
287
G401
Droop filter time
constant
0.3 s 0 to 1 s Set the filter time constant to apply to the current for torque.
288
G402
Droop function
activation selection
0
0
Without droop control during
acceleration/deceleration
(With 0 limit)
Rated motor frequency is
the droop compensation
reference
1
Constantly droop control
during operation
(With 0 limit)
2
Constantly droop control
during operation
(Without 0 limit)
10
Without droop control during
acceleration/deceleration
(With 0 limit)
Motor speed is the droop
compensation reference
11
Constantly droop control
during operation
(With 0 limit)
994
G403
Droop break point gain
9999
0.1 to 100%
Set the droop amount to be changed as % value of the rated
motor frequency.
9999 No function
995
G404
Droop break point torque
100% 0.1 to 100% Set the torque when the droop amount is to be changed.
Magnetic flux
Magnetic flux
Sensorless
Sensorless
Vector
Vector
PM
PM
Droop compensation
frequency
Torq ue
100%
Droop
gain
-100%
Frequency
0
Rated frequency

 Loading...
Loading...






