Torque control under Real sensorless vector control and vector control
218
PARAMETERS
Torque command by 16-bit digital input (Pr.804="4")
• Execute torque command by 12-bit or 16-bit digital input using FR-A8AX (plug-in option).
NOTE
• For the details of FR-A8AX setting, refer to the Instruction Manual of FR-A8AX.
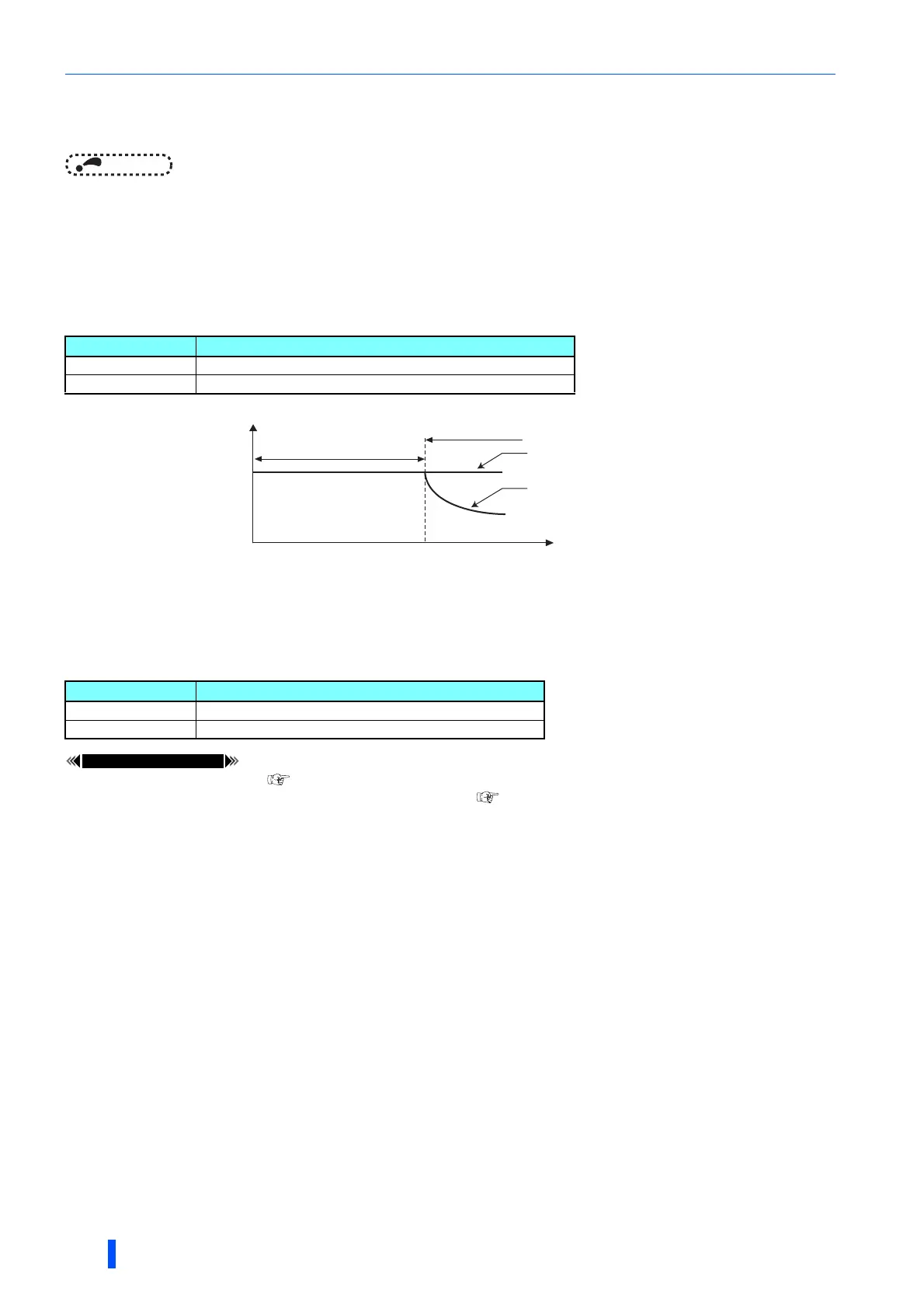
Modifying the torque characteristics in the constant output area (Pr.803)
• Because of the motor characteristics, torque is reduced at base frequency or higher. To generate a certain amount of
torque at base frequency or higher, use Pr.803 Constant output range torque characteristic selection="1 or 11".
• Under torque control, the torque generated in the low-speed range is constant regardless of Pr.803 setting.
Reverse selection of the torque command (Pr.1114)
• Whether the torque command polarity is reversed or not when the reverse rotation command (STR) is turned ON can be
selected using Pr.1114 Torque command reverse selection.
Pr.868 Terminal 1 function assignment page 410
Calibration parameter C16 (Pr.919) to C19 (Pr.920) (terminal 1 bias, gain torque) page 421
Pr.803 setting Torque characteristic in the constant output range
0 (initial value), 10 Constant motor output
1, 11 Constant torque
Pr.1114 setting Torque command polarity at STR signal ON (sign)
0 Not reversed
1 (initial value) Reversed
Speed
Base speed
Torque
Pr. 803 = 1, 11:
constant torque command
Pr. 803 = 0, 10:
constant power command
(torque reduction)
Constant torque range
Constant power range

 Loading...
Loading...






