Speed control under Real sensorless vector control, vector control, PM sensorless vector
control
192
PARAMETERS
5.3.5 Performing high-accuracy, fast-response control
(gain adjustment for Real sensorless vector
control, vector control and PM sensorless
vector control)
The value for the FR-A820-03160(55K) or lower and FR-A840-01800(55K) or lower.
The value for the FR-A820-03800(75K) or higher and FR-A840-02160(75K) or higher.
The load inertia ratio (load moment of inertia) for the motor is calculated in real time from the torque command and
rotation speed during motor driving by the vector control. Because the optimum gain for speed control and position
control is set automatically from the load inertia ratio and the response level, the work required for gain adjustment is
reduced. (Easy gain tuning)
If the load inertia ratio cannot be calculated due to load fluctuations, or under Real sensorless vector control or PM
sensorless vector control, the control gain can be set automatically by entering the load inertia ratio manually.
Manual gain adjustment is useful for achieving optimum machine performance or improving unfavorable conditions,
such as vibration and acoustic noise during operation with high load inertia or gear backlash.
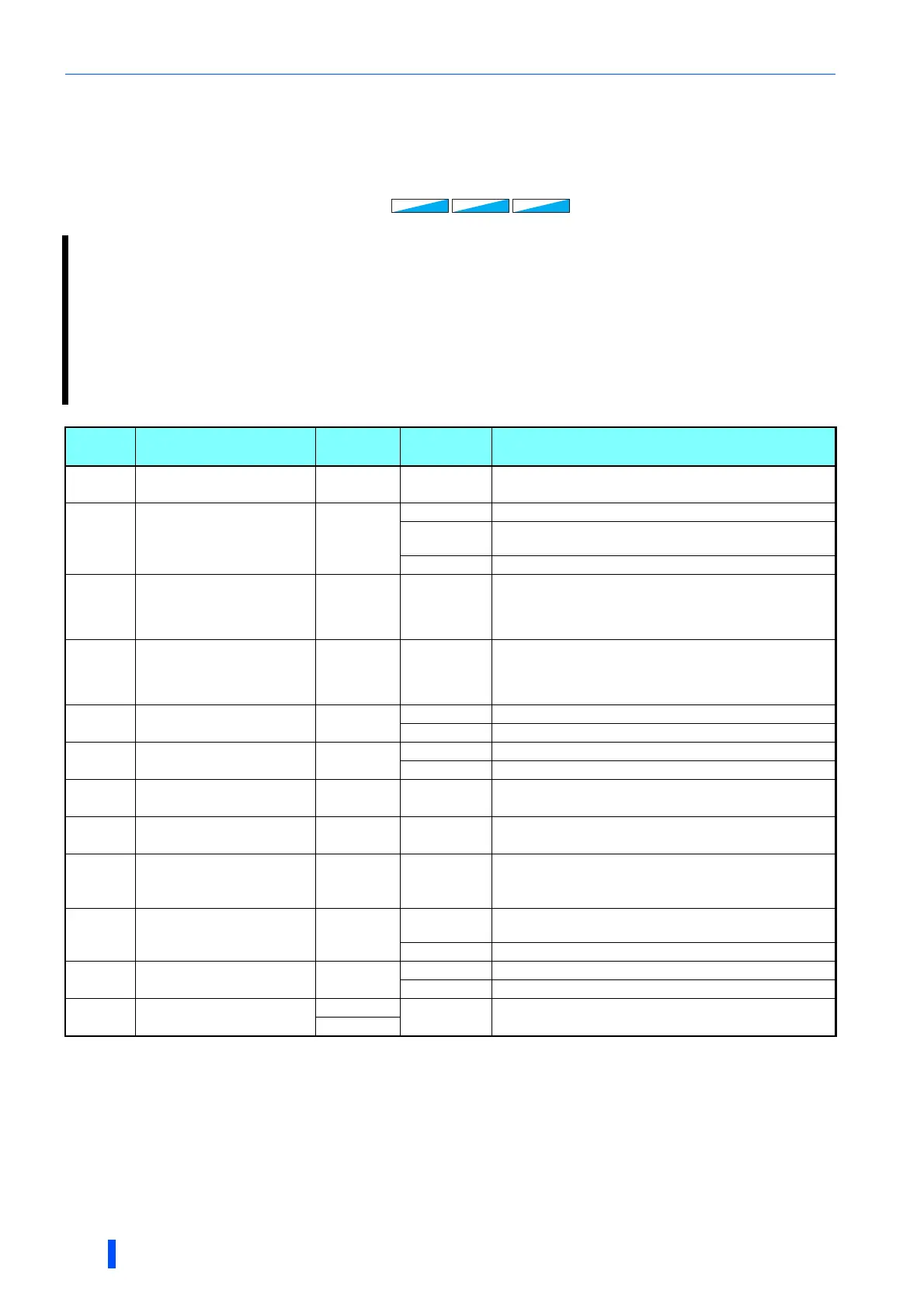
Pr. Name
Initial
value
Setting
range
Description
818
C112
Easy gain tuning
response level setting
2 1 to 15
Set the response level.
1 (slow-response) to 15 (fast-response)
819
C113
Easy gain tuning
selection
0
0 No easy gain tuning
1
Gain is calculated with load calculation
(This function is valid under vector control.)
2 Gain is calculated with load (Pr.880) manual input
820
G211
Speed control P gain 1
60% 0 to 1000%
The proportional gain during speed control is set. (Setting
this parameter higher improves the trackability for speed
command changes. It also reduces the speed fluctuation
caused by external disturbance.)
821
G212
Speed control integral
time 1
0.333 s 0 to 20 s
The integral time during speed control is set. (Setting this
parameter lower shortens the return time to the original
speed when the speed fluctuates due to external
disturbance.)
830
G311
Speed control P gain 2
9999
0 to 1000% Second function of Pr.820 (valid when RT signal is ON)
9999 The Pr.820 setting is applied to the operation.
831
G312
Speed control integral
time 2
9999
0 to 20 s Second function of Pr.821 (valid when RT signal is ON)
9999 The Pr.821 setting is applied to the operation.
880
C114
Load inertia ratio
7-fold 0 to 200-fold Set the load inertia ratio for the motor.
1115
G218
Speed control integral
term clear time
0 ms 0 to 9998 ms
Set time until the integral term is reduced and cleared after P
control switching.
1116
G206
Constant output range
speed control P gain
compensation
0% 0 to 100%
Set a compensation amount of the speed control P gain in
the constant output range (rated speed or higher).
1117
G261
Speed control P gain 1
(per-unit system)
9999
0 to 300
Set a proportional gain under speed control in the per-unit
system.
9999 The Pr.820 setting is applied to the operation.
1118
G361
Speed control P gain 2
(per-unit system)
9999
0 to 300 Second function of Pr.1117 (valid when RT signal ON)
9999 The Pr.1117 setting is applied to the operation.
1121
G260
Per-unit speed control
reference frequency
120 Hz
0 to 400 Hz
Set the speed at 100% when setting speed control P gain or
model speed control gain in the per-unit system.
60 Hz
Sensorless
Sensorless
Vector
Vector
PM
PM

 Loading...
Loading...






