Torque control under Real sensorless vector control and vector control
PARAMETERS
209
5
5.4 Torque control under Real sensorless
vector control and vector control
5.4.1 Torque control
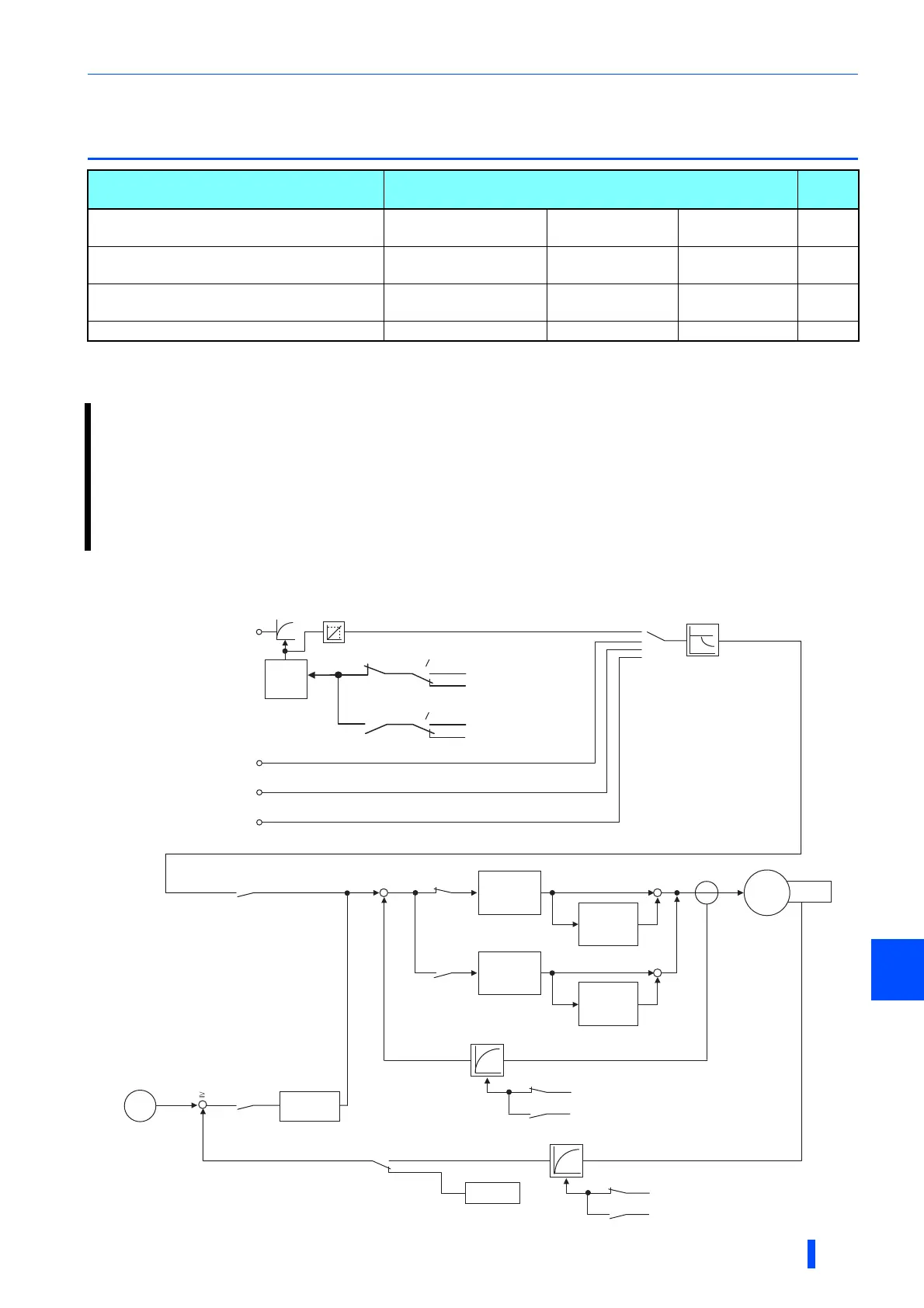
Block diagram
Purpose Parameter to set
Refer
to page
To selection the torque command source
and to set the torque command value
Torque command
P. D 4 0 0 t o P. D 4 0 2 ,
P.G210
Pr.803 to Pr.806,
Pr.1114
216
To prevent the motor from overspeeding Speed limit
P. H 4 1 0 t o P. H 4 1 2 ,
P. H 41 4
Pr.807 to Pr.809,
Pr.1113
219
To raise precision of torque control
Torque control gain
adjustment
P.G213, P.G214,
P.G313, P.G314
Pr.824, Pr.825,
Pr.834, Pr.835
225
To stabilize torque detection signal Torque detection filter P.G216, P.G316 Pr.827, Pr.837 254
• Under torque control, the operation is controlled to output the commanded torque.
• Motor rotation speed is steady when the motor output torque and load torque are balanced.
Thus, motor speed during torque control is determined by the load.
• Under torque control, motor speed accelerates so motor output torque does not exceed motor load. In order to
prevent the motor from overspeeding, set a speed limit. (Speed control is performed instead of torque control during
speed limit.)
• If speed limit is not set, speed limit value setting is regarded as 0 Hz and torque control is not enabled.
Terminal 1
[Pr. 868 = 3, 4]
Torque
setting
filter
Terminal 1 bias [C16,C17 (Pr. 919)]
Terminal 1 gain [C18,C19 (Pr. 920)]
Parameter
[Pr. 805, Pr. 806]
16bit digital input
(FR-A8AX)
CC-Link/PROFIBUS-DP
(FR-A8NC/FR-A8NCE/FR-A8NP)
Torque command
source selection
[Pr. 804]
Constant power range
torque characteristic selection
[Pr. 803]
Torque control
P gain 1
[Pr. 824]
RT
Torque control
integral time 1
[Pr. 825]
Torque control
P gain 2
[Pr. 834]
RT
+
+
+
+
Torque control
integral time 2
[Pr. 835]
RT
[Pr. 827]
[Pr. 837]
RT
Torque detection filter
-
RT
[Pr. 823]
[Pr. 833]
RT
Speed detection filter
Vector control
Motor Encoder
[Pr. 800 = 1]
Real sensorless
vector control
[Pr. 800 = 11]
Speed
estimation
+
Actual speed or estimated speed
< Speed limit value
Actual speed or estimated speed
Speed limit value
Speed control
(proportional
control)
-
+
RT
RT
[Pr. 826]
[Pr. 836]
[Pr. 74]
[Pr. 74]
[Pr. 836 = 9999]
[Pr. 836 = 9999]
[Pr. 826 = 9999]
[Pr. 826 = 9999]
Speed
limit value
Encoder
Motor
A

 Loading...
Loading...






