(G) Control parameters
596
PARAMETERS
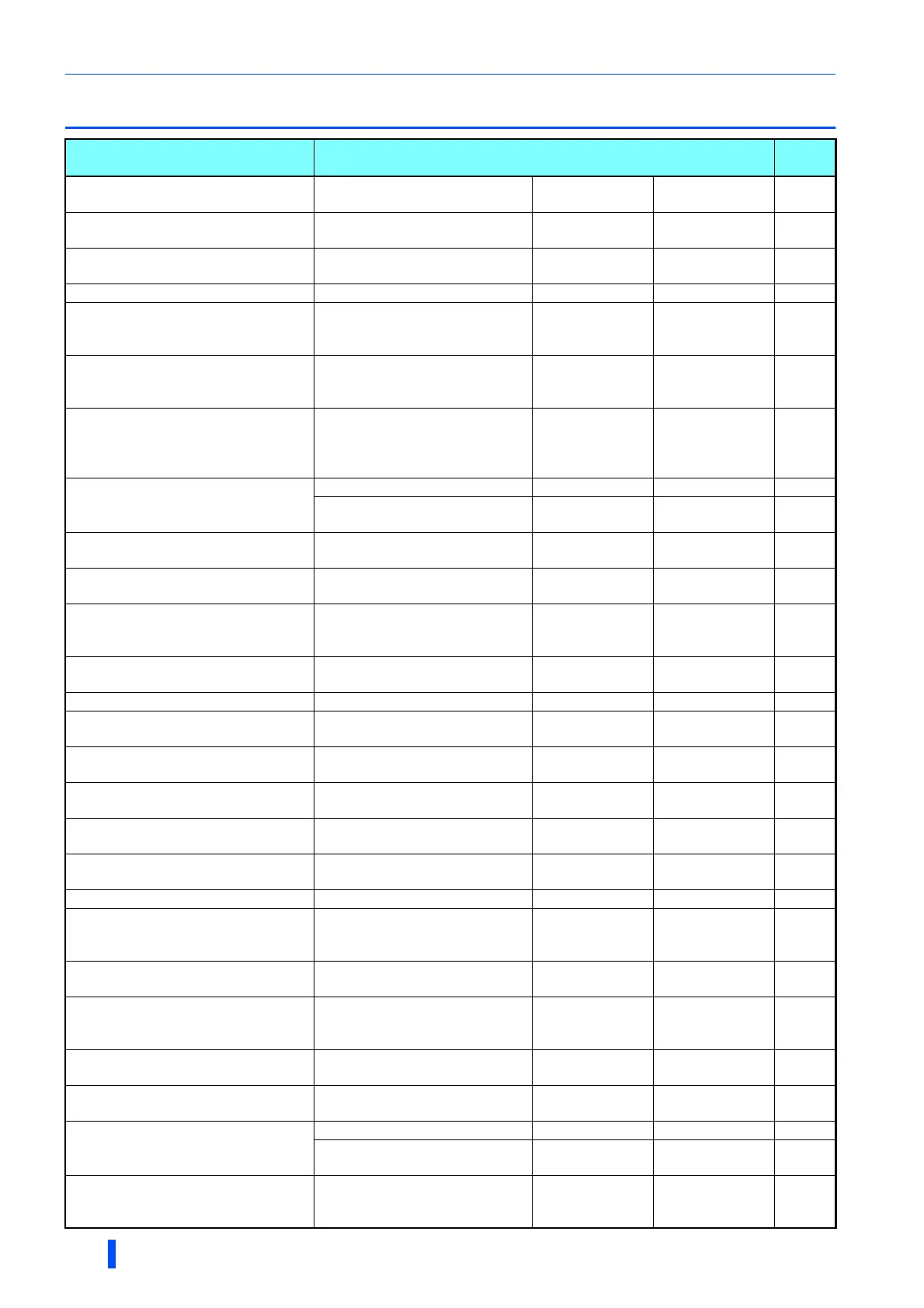
5.16 (G) Control parameters
Purpose Parameter to set
Refer
to page
To set the starting torque manually Manual torque boost
P. G 0 0 0 , P. G 0 1 0 ,
P. G 02 0
Pr.0, Pr.46,
Pr.112
597
To set the motor constant
Base frequency, base
frequency voltage
P. G 0 0 1 , P. G 0 0 2 ,
P.G011, P.G021
Pr.3, Pr.19,
Pr.47, Pr.113
598
To select the V/F pattern matching
the application
Load pattern selection P.G003 Pr.14 600
To perform energy saving operation Energy saving operation P.G030 Pr.60 602
To use a special motor Adjustable 5 points V/F
P.C100,
P. G 0 4 0 t o
P. G 04 9
Pr.71,
Pr.100 to Pr.109
603
To compensate the motor slip
amount when replacing an SF-JR
motor with an SF-PR motor
SF-PR slip amount adjustment
mode
P.G060, P.G061 Pr.673, Pr.674 604
To adjust the motor braking torque
DC injection brake, zero speed
control, and servo lock,
magnetic flux decay output
shutoff
P. G 1 0 0 t o
P. G 1 0 3 , P. G 11 0
Pr.10 to Pr.12,
Pr.802, Pr.850
605
To coast the motor to a stop
Output stop function P.G105 Pr.522 611
Selection of motor stop
method
P.G106 Pr.250 613
To use the regeneration unit to
increase the motor braking torque
Regenerative brake selection
P.E300, P.G107,
P. T 72 1
Pr.30, Pr.70,
Pr.599
614
To operate the inverter with DC
power supply
DC feeding mode P.E300 Pr.30 614
To avoid overvoltage alarm due to
regenerative driving by automatic
adjustment of the output frequency
Regeneration avoidance
function
P. G 1 2 0 t o
P. G 12 5
Pr.882 to Pr.886,
Pr.665
621
To decrease the deceleration time
of the motor
Increased magnetic excitation
deceleration
P. G 1 3 0 t o
P. G 13 2
Pr.660 to Pr.662 624
To select the control method Control method selection P.G200, P.G300 Pr.800, Pr.451 164
To secure the low-speed torque by
compensating the slip of the motor
Slip compensation
P. G 2 0 3 t o
P. G 20 5
Pr.245 to Pr.247 625
To select the torque characteristic
Constant output range torque
characteristic selection
P.G210 Pr.803
185,
216
To adjust the speed control gain Speed control gain
P.G211, P.G212
P.G311, P.G312
Pr.820, Pr.821,
Pr
.830, Pr.831
192
T
o adjust the torque control gain Torque control gain
P. G 2 1 3 , P. G 2 1 4 ,
P. G 3 1 3 , P. G 3 1 4
Pr.824, P.825,
Pr.834, P.835
225
To stabilizes speed and torque
feedback signal
Speed detection filter,
torque detection filter
P. G 2 1 5 , P. G 2 1 6 ,
P. G 3 1 5 , P. G 3 1 6
Pr.823, Pr.827,
Pr.833, Pr.837
254
To changes excitation ratio Excitation ratio P.G217 Pr.854 255
To improve the motor trackability
for the speed command changes
Speed feed forward control,
model adaptive speed control
P. G 2 2 4 , P. G 2 2 0
to P.G222,
P. G 22 3
Pr.828,
Pr.877 to Pr.879,
Pr.881
200
To make starting torque start-up
faster
Torque bias
P. G 2 3 0 t o
P. G 23 8
Pr.840 to Pr.848 202
To make the motor speed constant
by the encoder
Encoder feedback control
P. M 0 0 2 , P. A 1 0 7 ,
P.C140, P.C141,
P. G 2 4 0 , P. G 2 4 1
Pr.144, Pr.285,
Pr.359,
Pr.367 to Pr.369
626
To select low-speed range torque
characteristics
Low-speed range torque
characteristics
P.G250, P.G350 Pr.788, Pr.747 176
To perform frequency control
appropriate for load torque
Droop control
P. G 4 0 0 t o
P. G 40 4
Pr.286 to Pr.288,
Pr.994, Pr.995
628
To suppress the machine
resonance
Speed smoothing control P.G410, P.G411 Pr.653, Pr.654 630
Notch filter
P. G 6 0 1 t o
P. G 60 3
Pr.1003 to
Pr.1005
208
To adjust the speed gain for
Advanced magnetic flux vector
control
Speed control gain P.G932, P.G942 Pr.89, Pr.569 170

 Loading...
Loading...






