Torque control under Real sensorless vector control and vector control
216
PARAMETERS
5.4.4 Torque command
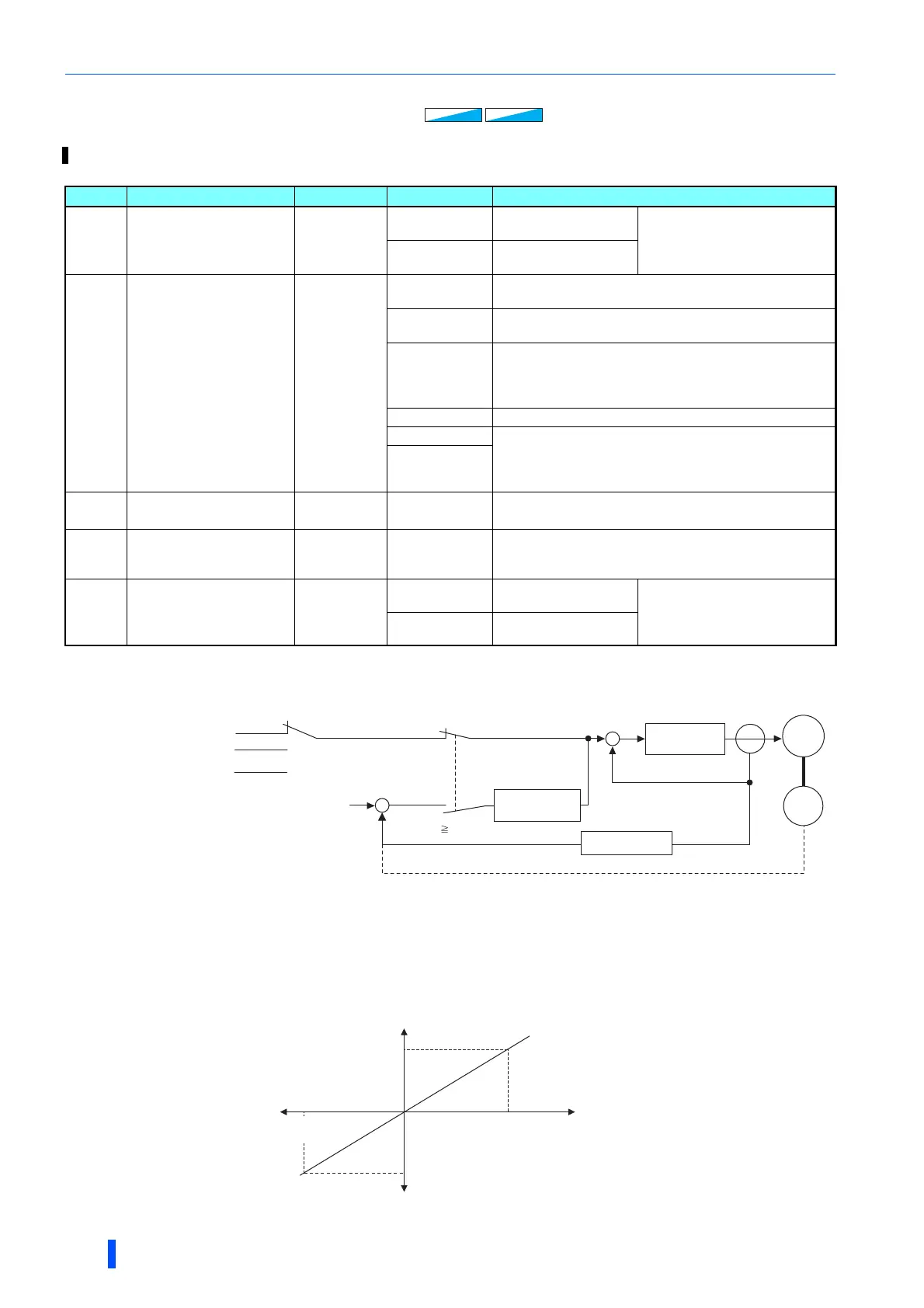
Control block diagram
Torque command by analog input (terminal 1) (Pr.804="0 (initial value)")
• Torque commands are given using voltage (current) input to the terminal 1.
•Set Pr.868 Terminal 1 function assignment="3, 4" to use the terminal 1 for torque command inputs.
• Torque commands given using analog inputs can be calibrated by calibration parameters C16 (Pr.919) to C19 (Pr.920)
(Refer to page 421.)
For torque control, the torque command source can be selected.
Pr. Name Initial value Setting range Description
803
G210
Constant output range
torque characteristic
selection
0
0
Constant motor output
command
In the torque command setting,
select torque command for the
constant output area.
1
Constant torque
command
804
D400
Torque command
source selection
0
0
Torque command based on the analog input to the terminal
1
1
Torque command (-400% to 400%) by the parameter setting
(Pr.805 or Pr.806)
3
Torque command via CC-Link communication (FR-A8NC/
FR-A8NCE)
Torque command via PROFIBUS-DR communication (FR-
A8NP)
4 12/16-bit digital input (FR-A8AX)
5 Torque command via CC-Link communication (FR-A8NC/
FR-A8NCE)
Torque command via PROFIBUS-DR communication (FR-
A8NP)
6
805
D401
Torque command
value (RAM)
1000% 600 to 1400%
Writes the torque command value in RAM. Regards 1000%
as 0%, and set torque command by an offset of 1000%.
806
D402
Torque command
value (RAM,EEPROM)
1000% 600 to 1400%
Writes the torque command value in RAM and EEPROM.
Regards 1000% as 0%, and set torque command by an
offset of 1000%.
1114
D403
Torque command
reverse selection
1
0 Not reversed
Select whether to reverse the
torque command polarity or not
when the reverse rotation
command (STR) is turned ON.
1 Reversed
Sensorless
SensorlessSensorless
SensorlessSensorless
Sensorless
Vector
Vector
+
-
-
Parameter [Pr. 805, Pr. 806]
16-bit digital input
(FR-A8AX)
Speed limit input
Speed control
(proportional control)
Analog input
0
1,3,5,6
4
[Pr. 804] Torque command
source selection
Torque control
+
Motor
Speed
estimated
value
Real sensorless vector control
Vector control
Speed
estimated
value
Speed estimator
Encoder
<Speed limit value
Speed limit value
Torque command
150%
-100%
(-10V)
0 100%
(+10V)
-150%
Terminal 1
analog input

 Loading...
Loading...






