Check first when you have a trouble
668
PROTECTIVE FUNCTIONS
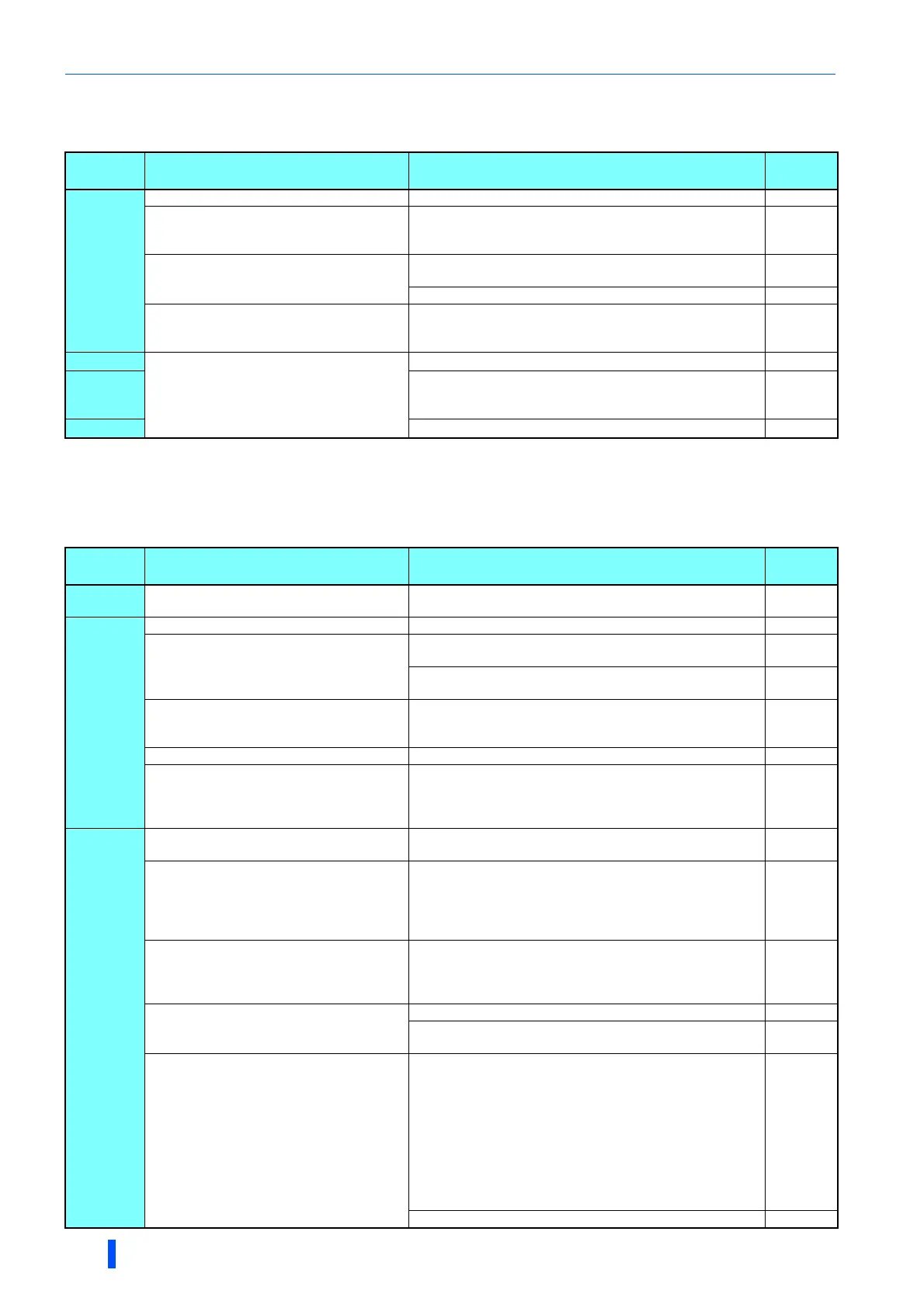
6.6.7 Acceleration/deceleration is not smooth
6.6.8 Speed varies during operation
Under Advanced magnetic flux vector control, Real sensorless vector control, vector control, and encoder feedback control,
the output frequency varies between 0 and 2 Hz as the load fluctuates. This is a normal operation and not a fault.
Check
points
Possible cause Countermeasure
Refer to
page
Parameter
Setting
Acceleration/deceleration time is too short. Increase the acceleration/deceleration time. 285
Torque boost (Pr.0, Pr.46, Pr.112) setting is
improper under V/F control, so the stall
prevention function is activated.
Increase/decrease the Pr.0 Torque boost setting value by
0.5% increments so that stall prevention does not occur.
597
The base frequency does not match the motor
characteristics.
Under V/F control, set Pr.3 Base frequency, Pr.47 Second V/
F (base frequency), and Pr.113 Third V/F (base frequency).
598
Under vector control, set Pr.84 Rated motor frequency. 164
Regeneration avoidance operation is
performed
If the frequency becomes unstable during regeneration
avoidance operation, decrease the setting of Pr.886
Regeneration avoidance voltage gain.
621
Load
Stall prevention (torque limit) function is
activated due to a heavy load.
Reduce the load weight.
Parameter
Setting
Set Pr.22 Stall prevention operation level (torque limit level)
higher according to the load. (If Pr.22 is set too high, an
overcurrent trip (E.OC[]) is likely to occur.)
185, 348
Motor
Check the capacities of the inverter and the motor.
Check
points
Possible cause Countermeasure
Refer to
page
Load
Load varies during an operation.
Select Advanced magnetic flux vector control, Real sensorless
vector control, vector control, or encoder feedback control.
164, 626
Input
signal
Frequency setting signal is varying. Check the frequency setting signal.
The frequency setting signal is affected by
EMI.
Set filter to the analog input terminal using Pr.74 Input filter
time constant , Pr.822 Speed setting filter 1.
413
Take countermeasures against EMI, such as using shielded
wires for input signal lines.
84
Malfunction is occurring due to the undesirable
current generated when the transistor output
unit is connected.
Use terminal PC (terminal SD when source logic) as a common
terminal to prevent a malfunction caused by undesirable
current.
50
Multi-speed command signal is chattering. Take countermeasures to suppress chattering.
Feedback signal from the encoder is affected
by EMI.
Place the encoder cable far from the EMI source such as main
circuit and power supply voltage.
Earth (ground) the shield of the encoder cable to the enclosure
using a metal P-clip or U-clip.
65
Parameter
Setting
Fluctuation of power supply voltage is too
large.
Under V/F control, change the Pr.19 Base frequency voltage
setting (approximately by 3%).
598
Pr.80 Motor capacity and Pr.81 Number of
motor poles are not appropriate for the motor
capacity under Advanced magnetic flux vector
control, Real sensorless vector control, vector
control, or PM sensorless vector control.
Check the settings of Pr.80 and Pr.81. 164
Wiring length exceeds 30 m when Advanced
magnetic flux vector control, Real sensorless
vector control, vector control, or PM
sensorless vector control is selected.
Perform offline auto tuning. 442
Under V/F control, wiring is too long and a
voltage drop occurs.
In the low-speed range, set 0.5% in Pr.0 Torque boost. 597
Change the control method to Advanced magnetic flux vector
control or Real sensorless vector control.
164
Hunting occurs by the generated vibration, for
example, when structural rigidity at load side is
insufficient.
Disable automatic control functions, such as the energy saving
operation, fast-response current limit operation, torque limit,
regeneration avoidance function, Advanced magnetic flux
vector control, Real sensorless vector control, vector control,
encoder feedback control, droop control, stall prevention, online
auto tuning, notch filter, and orientation control.
Under PID control, set smaller values to Pr.129 PID
proportional band and Pr.130 PID integral time.
Adjust so that the control gain decreases and the level of safety
increases.
Change Pr.72 PWM frequency selection setting. 277

 Loading...
Loading...






