(A) Application parameters
PARAMETERS
491
5
GROUP
A
Setting I/O signals
Selecting stop position command (Pr.350 Stop position command
selection)
• Select either to use the internal stop position command (Pr.356 Internal stop position command) or the external stop
position command (16-bit data using the FR-A8AX).
• When the external stop position command (Pr.350 = "1") is selected while the FR-A8AX option is mounted, 16-bit data
(binary input) is used to give the stop position.
• The value set in Pr.360 16-bit data selection should be the divided value minus 1.
Signal Signal name Description
X22 Orientation command
Use a terminal to input the orientation signal that commands orientation.
For the X22 signal input, set "22" in any of Pr.178 to Pr.189 to assign the function.
ORA Orientation complete
Output switches to Low if the orientation stop has made within the orientation complete width while the
start and
X22
signals are input.
For the ORA signal output, set "27 (positive logic)" or "127 (negative logic)" in any of Pr.190 to Pr.196.
ORM Orientation fault
Output switches to Low if the orientation not stop has made within the orientation complete width while
the start and
X22
signals are input.
For the ORM signal output, set "28 (positive logic)" or "128 (negative logic)" in any of Pr.190 to Pr.196.
Pr.350 setting Stop position command source
0 Internal stop position command (Pr.356: 0 to 16383)
1 External stop position command (FR-A8AX) 16-bit data
9999 (Initial
value)
Orientation control invalid
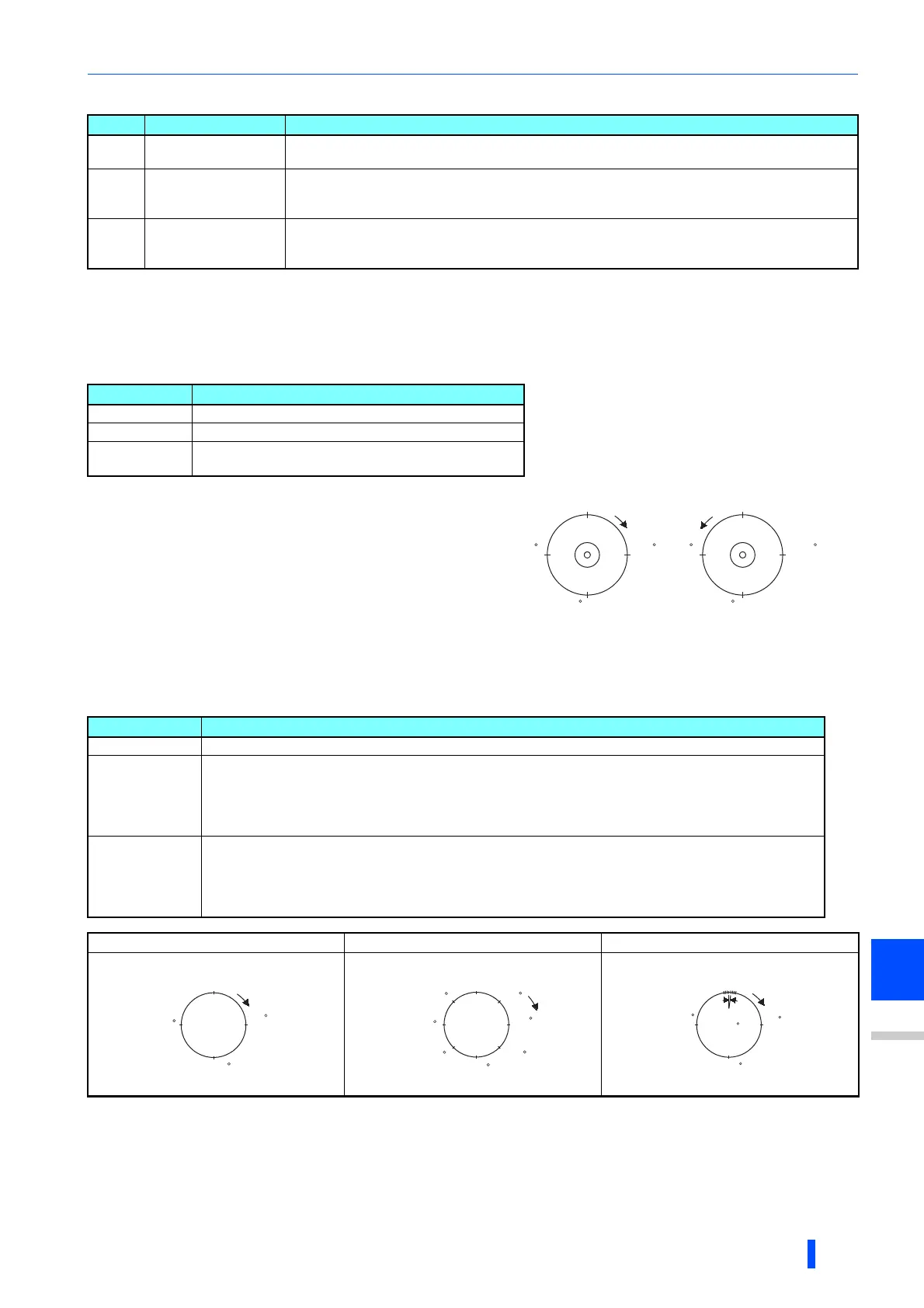
• When the internal stop position command (Pr.350 = "0") is
selected, the Pr.356 setting is used as the stop position.
• When the number of encoder pulses is 1024 pulses/r, one
revolution (360°) of the encoder is divided by 4096 pulses
so that the degree per pulse can be calculated as 360° /
4096 pulses = 0.0879°/pulse. Refer to the figure on the
right. Stop position (address) is shown within parentheses.
Pr.360 Setting Description
0 External position command is invalid (speed command or torque command via the FR-A8AX)
1
Position command direct input
The 16-bit digital signal via the FR-A8AX is the direct stop position command.
<Example>
When the Pr.369 Number of encoder pulses setting is "1024", the stop position command from "0 to 4095" can
be input using FR-A8AX, and the digital signal of "2048 (H800)" is input to stop the motor at a 180° position.
2 to 127
Set the stop position command by dividing up to 128 stop positions.
If the external stop command input is greater than the setting, the stop positions are the same as those in the
maximum external stop command value.
<Example>
When the number of stop positions is 90 (divided at intervals of 4°), 90 - 1 = 89. Hence, set "89".
[Example 1] When Pr.369 = "1024" [Example 2] With 8 stop positions [Example 3] With 120 stop positions
Pr.360 = "1" Pr.360 = "7" Pr.360 = "119"
Origin (0)
Origin (0)
CW
CCW
270
(3072)
90
(1024)
Pr.359 = 1
270
(3072)
180 (2048)
Pr.359 = 0
180 (2048)
90
(1024)
270
(3072(HC00))
180
(2048(H800))
90
(1024(H400))
CW
Origin (0)
Origin(0)
(7 or more)
315
(6)270
(5)225
(1)
45
135
(3)
180
(4)
90
(2)
CW
Origin (0)
CW
At intervals
of 3
270
(90)
180
(60)
90
(30)

 Loading...
Loading...






