(N) Operation via communication and its settings
PARAMETERS
561
5
GROUP
N
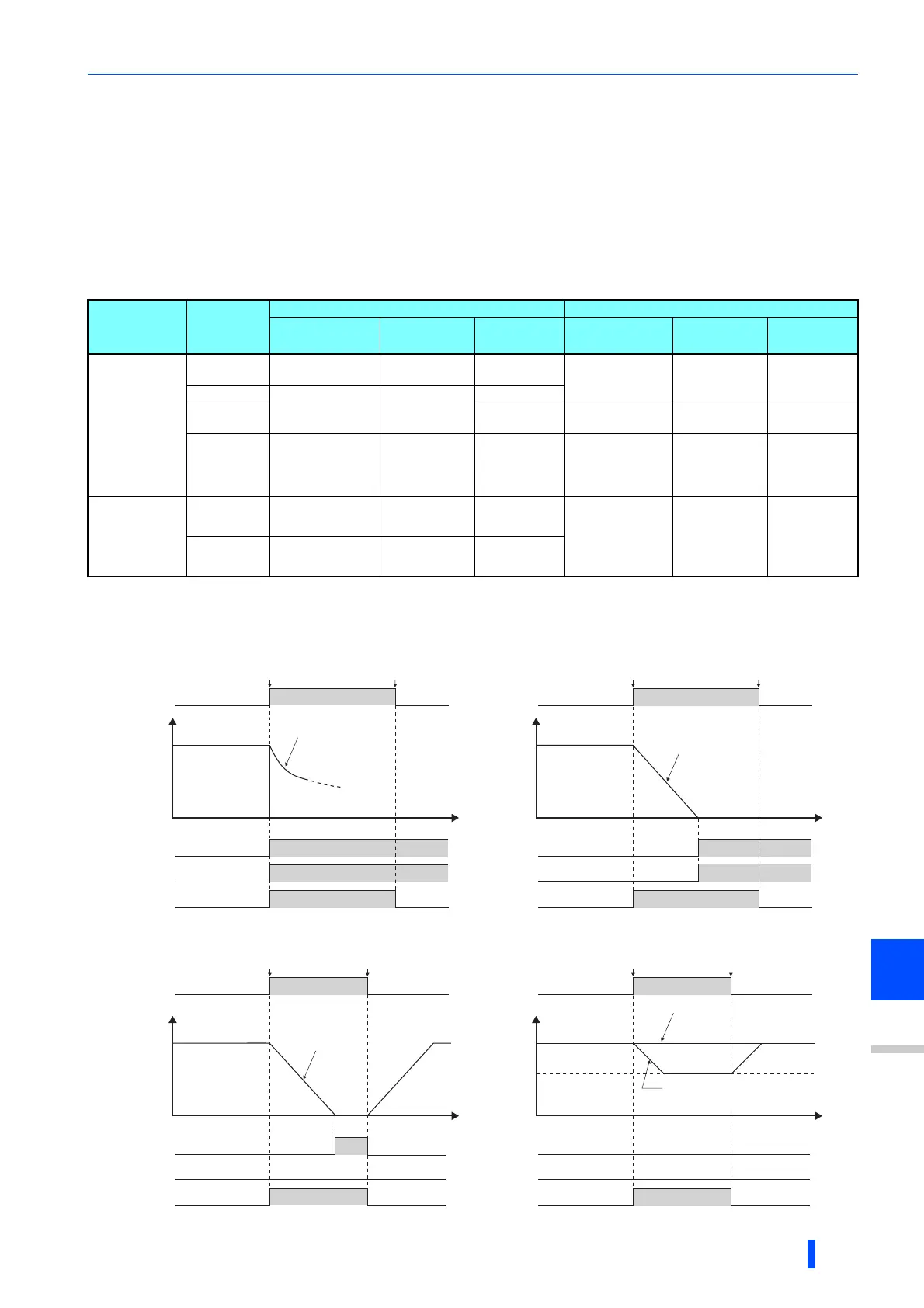
Operation selection at a communication error (Pr.502, Pr.779)
• For communication using RS-485 terminals or a communication option, operation at a communication error can be
selected. The operation is active under the Network operation mode.
• Select the stop operation at the retry count excess (Pr.335, only with Mitsubishi inverter protocol) or at a signal loss
detection (Pr.336, Pr.539).
• When a communication error is detected while communication with the RS-485 terminals is performed, the alarm (LF)
signal is output to an output terminal of the inverter. To use the LF signal, set "98 (positive logic) or 198 (negative logic)" in
any of Pr.190 to Pr.196 (output terminal function selection) to assign the function to the output terminal. (While
communication is performed with a communication option, LF signal is output only when "3" is set in Pr.502.)
If in communication by the communication option, E.OP1 is displayed.
Under position control, the operation is continued to the target position.
When the communication error is removed during deceleration, the motor re-accelerates.
Under position control, the motor does not re-accelerates even when the communication error is removed during deceleration.
If in communication by the communication option, E.OP1 is displayed.
Error
definition
Pr.502
setting
At fault occurrence At fault removal
Operating
status
Indication
Fault (ALM)
signal
Operating
status
Indication
Fault (ALM)
signal
Communication
line
0
(initial value)
Coasts to stop E.SER
ON
Stop status
continues
E.SER
ON
1
Deceleration stop
E.SER after
stop
ON after stop
2OFF
Automatic restart
function
Normal display OFF
3
Operation
continued at the
set frequency of
Pr.779
Normal display OFF Normal operation Normal display OFF
Communication
option itself
(When a
communication
option is used)
0, 3 Coasts to stop E. 1 ON
Stop status
continues
E. 1 ON
1, 2 Deceleration stop E. 1 after stop ON after stop
Time
Motor coasting
Communication
fault
Output frequency
Fault display
(E.SER
∗1)
Fault output
(ALM)
ONOFF OFF
Display
ON
OFF
Fault occurrence Fault removal
Time
Fault display
(E.SER
∗1)
Fault output
(ALM)
ONOFF OFF
Display
ONOFF
Pr. 502 setting "0" (initial value) Pr. 502 setting "1"
Pr. 502 setting "2" Pr. 502 setting "3"
Time
Communication
fault
Fault display
( E.SER
∗1)
Fault output
(ALM)
ONOFF OFF
Display
OFF
Decelerates
to stop
Fault occurrence
Fault removal
Time
Communication
fault
Fault display
Fault output
(ALM)
ONOFF OFF
OFF
Fault recognition Fault removal
Pr.779 = “9999”
Pr.779 ≠“9999”
(Runs at the frequency setting of Pr.779)
Not displayed
Alarm output
(LF)
ONOFF OFF
Communication
fault
Fault occurrence
Fault removal
Motor coasting
Output frequency
Output frequency
Output frequency
Alarm output
(LF)
ONOFF OFF
Alarm output
(LF)
ONOFF OFF Alarm output
(LF)
ONOFF OFF

 Loading...
Loading...






