Speed control under Real sensorless vector control, vector control, PM sensorless vector
control
PARAMETERS
201
5
NOTE
• The speed feed forward control is enabled for the first motor.
• Even if the driven motor is switched to the second motor while Pr.877= "1", the second motor is operated as Pr.877="0".
• Under PM sensorless vector control, this function is available when low-speed range high-torque characteristic is enabled by
Pr.788 Low speed range torque characteristic selection="9999 (initial value)". (Refer to page 176.)
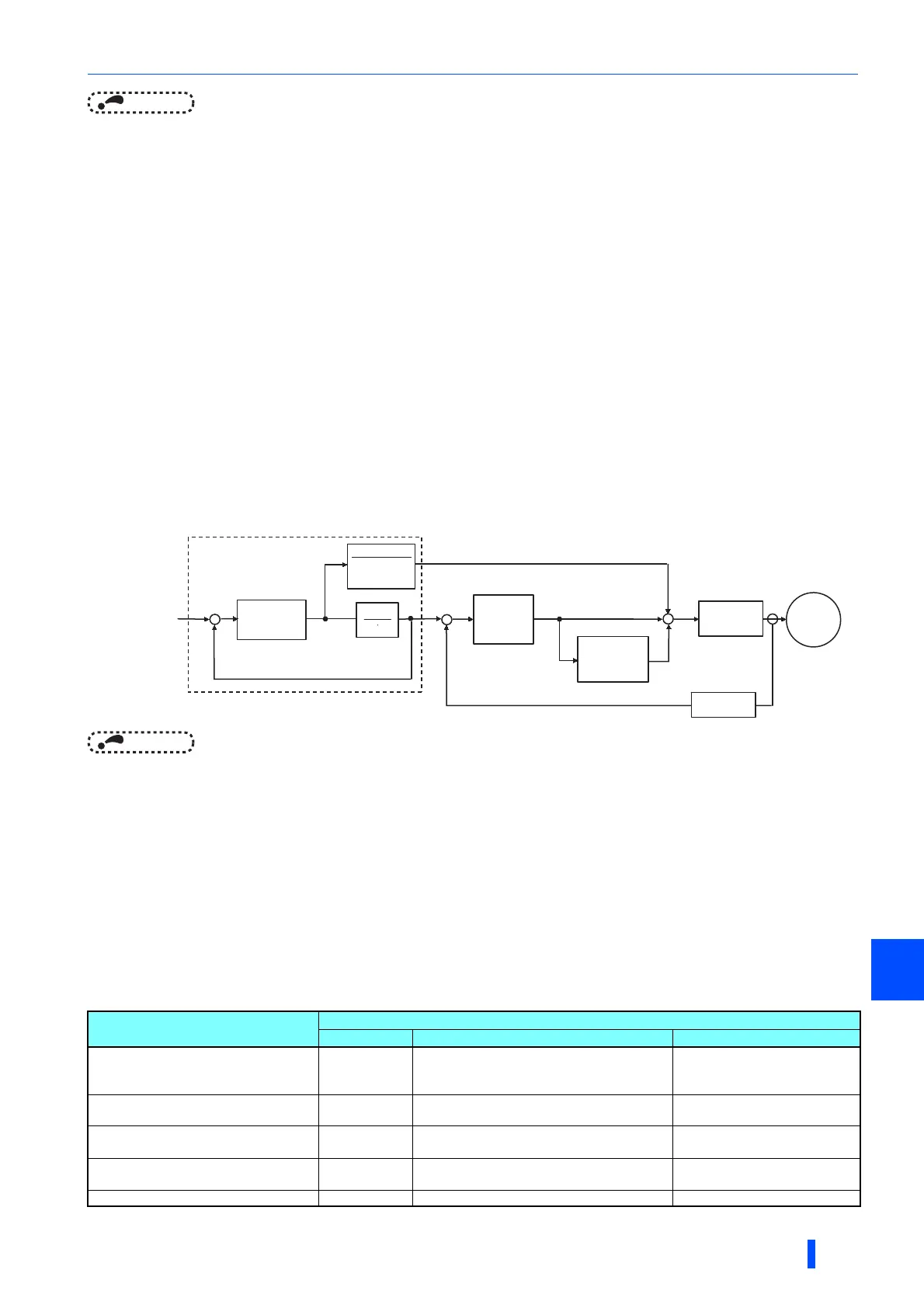
Model adaptive speed control (Pr.877 = "2", Pr.828, Pr.1119)
• The model speed of the motor is calculated, and the feedback is applied to the speed controller on the model side. Also,
this model speed is set as the command of the actual speed controller.
• The inertia ratio of Pr.880 is used when the speed controller on the model side calculates the torque current command
value.
• The torque current command of the speed controller on the model side is added to the output of the actual speed controller,
and set as the input of the iq current control.
Pr.828 is used for the speed control on the model side (P control), and first gain Pr.820 is used for the actual speed
controller.
• The model speed control gain can be set in the per-unit (pu) system in Pr.1119.
• In the per-unit system:
When "1" is set, the torque (Iq) command is 100% (rated Iq) when the speed deviation is 100%.
When "10" is set, the torque (Iq) command is 10% (rated Iq) when the speed deviation is 10%.
Set the 100% speed in Pr.1121 Per-unit speed control reference frequency.
NOTE
• The model adaptive speed control is enabled for the first motor.
• Even if the driven motor is switched to the second motor while Pr.877 ="2", the second motor is operated as Pr.877 ="0".
• Under PM sensorless vector control, the notch filter is available when low-speed range high-torque characteristic is enabled
by Pr.788 Low speed range torque characteristic selection="9999 (initial value)". (Refer to page 176.)
• Under model adaptive speed control, because the appropriate gain values for the model and actual loop sections are based
on the response that was set for easy gain tuning, when raising the response level, Pr.818 Easy gain tuning response level
setting must be re-evaluated (raised).
• The per-unit system setting is available only under Real sensorless vector control or vector control.
• When the speed control P gain or model speed control gain is set in the per-unit system, the easy gain tuning selection
(Pr.819="1 or 2") becomes invalid.
Combining with easy gain tuning
• The following table shows the relationship between speed feed forward and model adaptive speed control, and the easy
gain tuning function.
Easy gain tuning selection (Pr.819) setting
0 1 2
Pr.880 Load inertia ratio Manual input
The inertia ratio value calculated by easy
gain tuning is displayed.
Manual input is available only during a stop.
Manual input
Pr.820 Speed control P gain 1 Manual input
The tuning result is displayed.
Write is not available.
The tuning result is displayed.
Write is not available.
Pr.821 Speed control integral time 1 Manual input
The tuning result is displayed.
Write is not available.
The tuning result is displayed.
Write is not available.
Pr.828 Model speed control gain Manual input
The tuning result is displayed.
Write is not available.
The tuning result is displayed.
Write is not available.
Pr.881 Speed feed forward gain Manual input Manual input Manual input
Torque
control
Speed
estimator
Speed control
P gain 1
Speed control
integral time 1
M
Speed command
Actual speed controller
Model speed
calculation
+
-
+
+
+
Model speed
control gain
[Pr. 828]
1
J s
J
Torque coefficient
(J: )
+
-
Model adaptive speed control
[Block diagram]
[Pr. 880]
[Pr. 820]
[Pr. 821]

 Loading...
Loading...






