Speed control under Real sensorless vector control, vector control, PM sensorless vector
control
PARAMETERS
197
5
Setting the speed control P gain in the per-unit system (Pr.1117, Pr.1118,
Pr.1121)
• The speed control P gain can be set in the per-unit (pu) system.
• In the per-unit system:
When "1" is set, the torque (Iq) command is 100% (rated Iq) when the speed deviation is 100%.
When "10" is set, the torque (Iq) command is 10% (rated Iq) when the speed deviation is 10%.
Set the 100% speed in Pr.1121 Per-unit speed control reference frequency.
• The speed control P gain becomes as follows according to Pr.1117 Speed control P gain 1 (per-unit system), Pr.1118
Speed control P gain 2 (per-unit system), and the RT signal.
NOTE
• The per-unit system setting is available only under Real sensorless vector control or vector control.
• When the speed control P gain or model speed control gain is set in the per-unit system, the easy gain tuning selection
(Pr.819="1 or 2") becomes invalid.
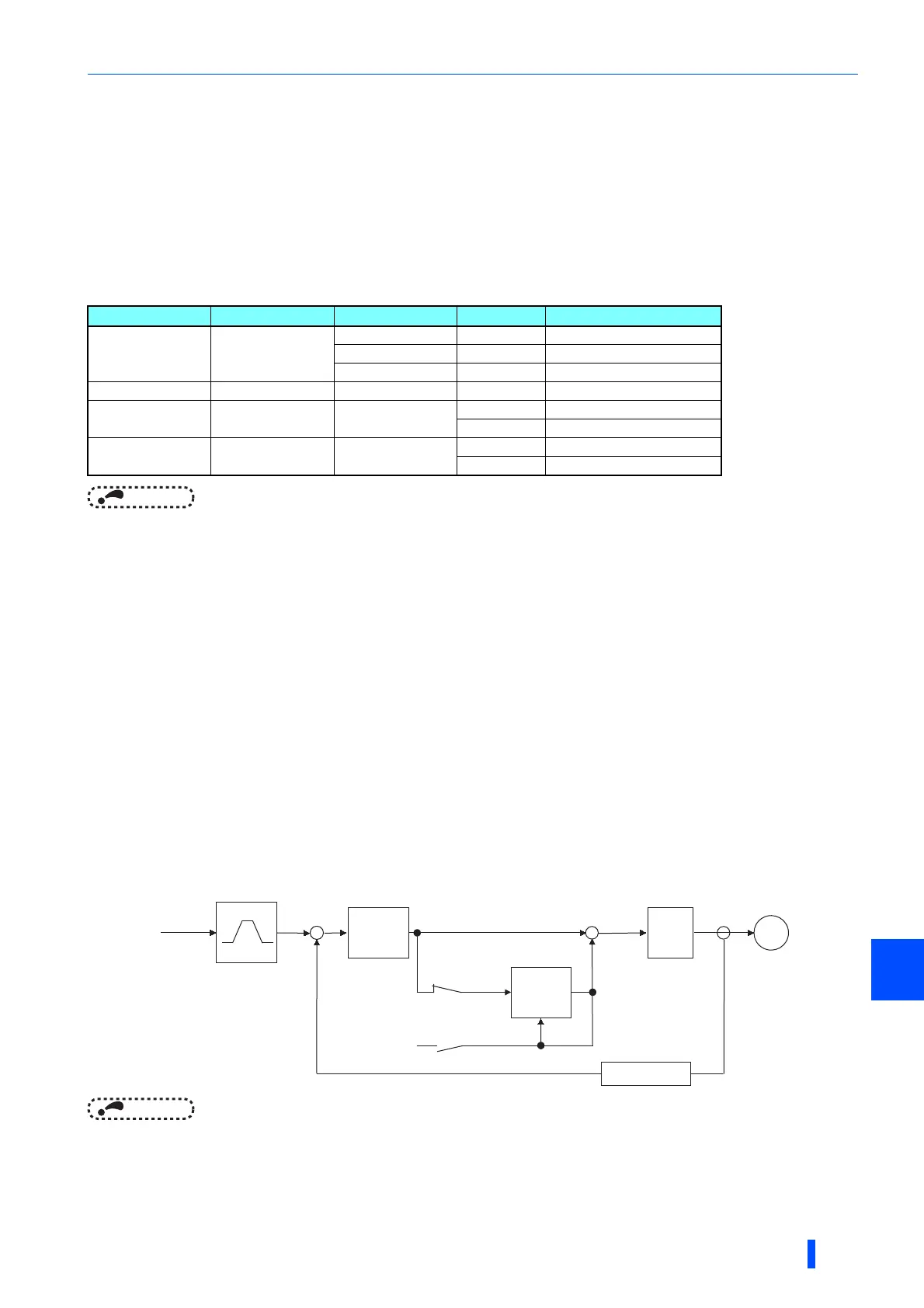
Switching over P/PI control (Pr.1115, X44 signal)
• In speed control under Real sensorless vector control or vector control, whether or not to add the integral time (I) when
performing gain adjustment with P gain and integral time can be performed with the P/PI control switchover signal (X44).
When X44 signal is OFF................... PI control
When X44 signal is ON..................... P control
• To input the X44 signal, set "44" in any of Pr.178 to Pr.189 (input terminal function selection) to assign the function to a
terminal.
• When the X44 signal is turned ON, integration is stopped and the accumulated integral term is reduced and cleared
according to Pr.1115 Speed control integral term clear time. Shock at P/PI control switchover is absorbed.
In Pr.1115, set time when the integral term is reduced from 100% to 0% regarding the rated torque current (Iq) as 100%.
Turning OFF the X44 signal resumes the integral operation.
[Function block diagram]
NOTE
• Changing the terminal assignment using Pr.178 to Pr.189 (input terminal function selection) may affect the other
functions. Set parameters after confirming the function of each terminal.
Pr.1117 Pr.1118 Pr.830 RT signal Speed control P gain
9999 9999
OFF Pr.820
9999 ON Pr.820
Other than 9999 ON Pr.830
Other than 9999 9999 Pr.1117
9999 Other than 9999
OFF Pr.820
ON Pr.1118
Other than 9999 Other than 9999
OFF Pr.1117
ON Pr.1118
X44-ON
X44-OFF
+
+
0
Speed
command
Speed
command
+
-
Speed
proportional
operation
Integral term
reduction
Speed
integral
operation
Speed estimator
Torque
control
Motor

 Loading...
Loading...






