(A) Application parameters
PARAMETERS
499
5
GROUP
A
Servo rigidity adjustment (Pr.362, Pr.396 to Pr.398) (Vector control)
• To increase the servo rigidity during orientation stop using Pr.396 Orientation speed gain (P term) or Pr.397
Orientation speed integral time, adjust with the following procedures.
1) Increase the Pr.362 Orientation position loop gain value to the extent that rocking
does not occur during orientation
stop.
2) Increase Pr.396 and Pr.397 at the same rate.
Normally, adjust Pr.396 in the range from 10 to 100, and Pr.397 from 0.1 to 1.0 s.
(Note that these do not need to be set to the same rate.)
<Example>
When the Pr.396 value is multiplied by 1.2, divide the Pr.397 value by 1.2.
If vibration occurs during orientation stop, the scale cannot be raised any higher.
3) Pr.398 Orientation speed gain (D term) is the lag/advance compensation gain.
The limit cycle
can be prevented by increasing the value, and operation can be stopped stably. However, the torque
will decrease in relation to the position deviation, and the motor will stop with deviation.
Servo rigidity: This is the response when a position control loop is configured.
When the servo rigidity is raised, the holding force will increase and operation will stabilize, but vibration will more easily occur.
When the servo rigidity is lowered, the holding force will decrease, and the settling time will increase.
Rocking: Movement in which return occurs when the stopping position is exceeded.
Limit cycle: This is a phenomenon that generates continuous vibration centering on the target position.
POINTPOINT
• Application of lag/advance control and PI control
PI control can be applied by setting Pr.398 to 0. Normally, use the lag/advance control. PI control should be used when using
a machine with a high spindle static friction torque and requires a stop position accuracy.
Pr.399 Orientation deceleration ratio (initial value: 20) (Vector control)
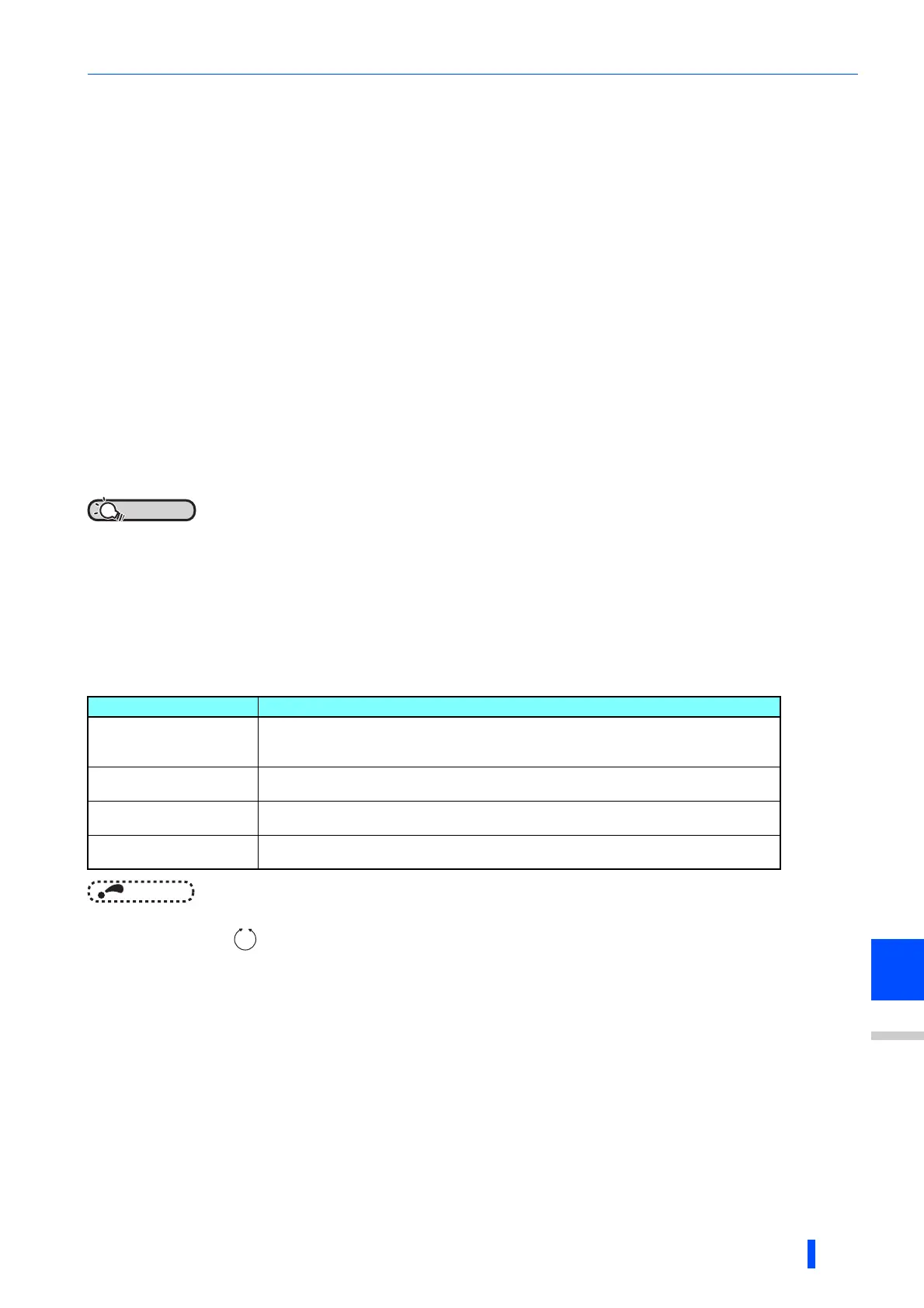
• Make adjustments, as shown below, according to the orientation status. (Make adjustments in the order of a, b, and c.)
Normally, adjust Pr.362 Orientation position loop gain in the range from 5 to 20, and Pr.399 Orientation deceleration
ratio from 5 to 50.
NOTE
• Orientation stop operation will fail, causing an excessive position error, or if the motor performs forward/reverse reciprocation
operation , review the settings of Pr.393 Orientation selection (on page 489) and Pr.359 Encoder rotation direction
(on page 488).
Condition Adjustment procedure
Rocking occurs during
stopping
a. Decrease the Pr.399 setting.
b. Decrease the Pr.362 setting.
c. Increase the Pr.396 and Pr.397 settings.
The orientation time is long.
a. Increase the Pr.399 setting.
b. Increase the Pr.362 setting.
Hunting occurs during
stopping
a. Decrease the Pr.362 setting.
b. Decrease the Pr.396 setting and increase the Pr.397 setting.
Low servo rigidity during
stopping
a. Increase the Pr.396 setting and decrease the Pr.397 setting.
b. Increase the Pr.362 setting.

 Loading...
Loading...






