Real sensorless vector control, vector control, PM sensorless vector control adjustment
PARAMETERS
255
5
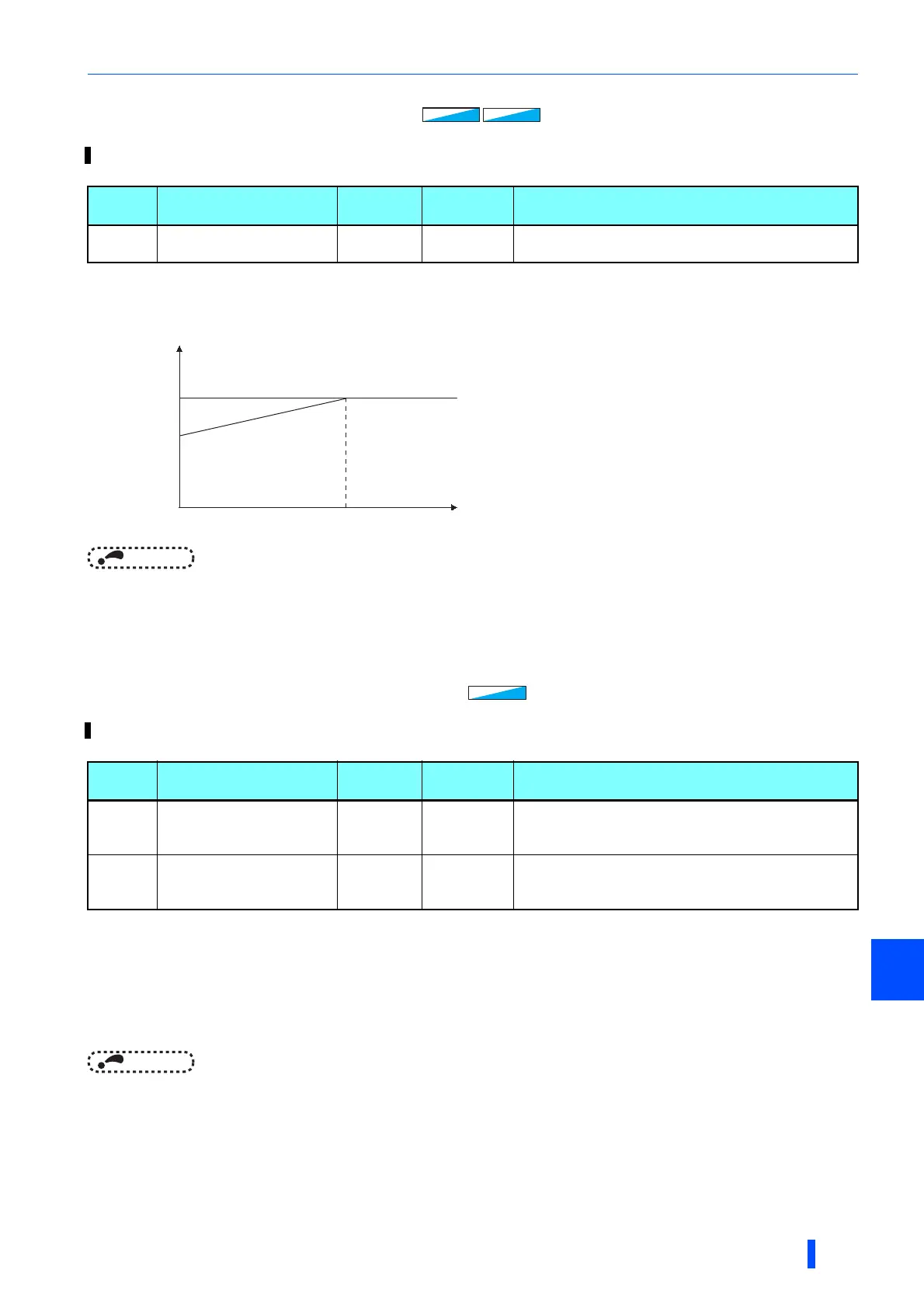
5.6.2 Excitation ratio
• When excitation ratio is reduced, output torque startup is less responsive.
This function is suitable for applications such as machine tools that suddenly accelerate/decelerate repeatedly up to high
speed.
NOTE
• The setting of Pr.854 is invalid if Pr.858 Terminal 4 function assignment or Pr.868 Terminal 1 function assignment is set
to "1" (flux command according to terminal).
5.6.3 Gain adjustment of current controllers for the d
axis and the q axis
• Use Pr.824 Torque control P gain 1 (current loop proportional gain) to adjust the proportional gain of current controllers
for the d axis and the q axis. The 100% gain is equivalent to 1000 rad/s. Setting this parameter higher improves the
trackability for current command changes. It also reduces the current fluctuation caused by external disturbance.
• Use Pr.825 Torque control integral time 1 (current loop integral time) to set the integral time of current controllers for
the d axis and the q axis. If the setting value is small, it produces current fluctuation toward disturbance, decreasing time
until it returns to original current value.
NOTE
• Pr.834 Torque control P gain 2 and Pr.835 Torque control integral time 2 are valid when terminal RT is ON. In this case,
replace them for Pr.824 and Pr.825 in the description above.
The excitation ratio can be lowered to enhance efficiency for light loads. (Motor magnetic noise can be reduced.)
Pr. Name
Initial
value
Setting
range
Description
854
G217
Excitation ratio
100% 0 to 100% Set an excitation ratio when there is no load.
The gain of the current controller can be adjusted.
Pr. Name
Initial
value
Setting
range
Description
824
G213
Torque control P gain 1
(current loop
proportional gain)
100% 0 to 500% The proportional gain of the current controller is set.
825
G214
Torque control integral
time 1 (current loop
integral time)
5 ms 0 to 500 ms The integral time of the current controller is set.
Sensorless
SensorlessSensorless
Sensorless
Sensorless
Sensorless
Vector
Vector
Excitation ratio
[%]
100
(Initial value)
Pr.854
setting
0 100 Load[%]
PM
PM

 Loading...
Loading...






