(A) Application parameters
PARAMETERS
503
5
GROUP
A
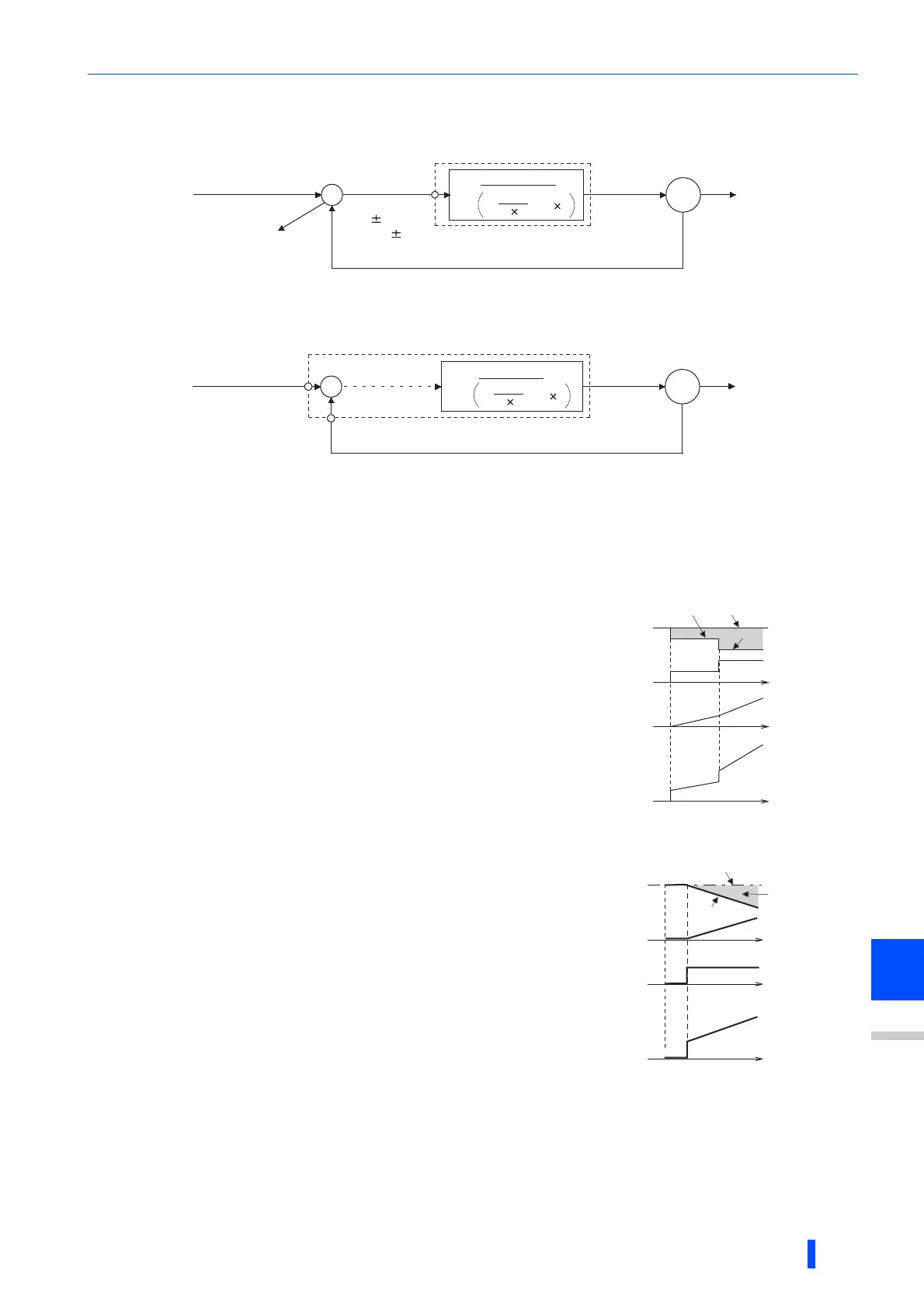
Basic configuration of PID control
• Pr.128 ="10, 11" (deviation value signal input)
Set "0" to Pr.868 Terminal 1 function assignment. When Pr.868 "0", PID control is invalid.
• Pr.128 = "20, 21" (measured value input)
Note that the input of terminal 1 is added to the set point of terminal 2 as a set point.
Set "0" to Pr.858 Terminal 4 function assignment. When Pr.858 "0", PID control is invalid.
PID action outline
• PI action
• PD action
PI action is a combination of proportional action (P) and integral action (I), and
applies a manipulated amount according to the size of the deviation and
transition or changes over time.
[Example of action when the measured value changes in a stepped manner]
(Note) PI action is the result of P and I actions being added together.
PD action is a combination of proportional action (P) and differential action (D),
and applies a manipulated amount according to the speed of the deviation to
improve excessive characteristics.
[Example of action when the measured value changes proportionately]
(Note) PD action is the result of P and D actions being added together.
+
-
M
Deviation signal
Feedback signal (measured value)
Ti S
1
1+
+Td S
Kp
PID operation
To outside
Set point
Inverter circuit
Motor
Terminal 1
0 to 10VDC
(0 to 5V)
Kp: Proportionality constant Ti: Integral time S: Operator Td: Differential time
Manipulated
variable
∗1
+
-
M
Pr.133 or
terminal 2
Set point
Terminal 4
0 to 5VDC
(0 to 10V, 4 to 20mA)
4 to 20mADC (0 to 5V, 0 to 10V)
Feedback signal (measured value)
PID operation
Inverter circuit
Motor
Kp: Proportionality constant Ti: Integral time S: Operator Td: Differential time
Manipulated
variable
Ti S
1
1+
+Td S
Kp
∗3
∗2
Deviation
Set point
Measured value
Time
Time
Time
PI action
I action
P action
Deviation
Set point
Measured value
Time
Time
Time
PD
action
D action
P action

 Loading...
Loading...






