(A) Application parameters
PARAMETERS
497
5
GROUP
A
Position loop gain (Pr.362) (V/F control, Advanced magnetic flux vector
control)
• When the servo torque function is selected using Pr.358 Servo torque selection, the output frequency for generating
servo torque gradually increases to the Pr.352 Creep speed according to the slope set in Pr.362 Orientation position
loop gain.
• Although the operation becomes faster when the value is increased, a machine may hunt, etc.
Description of orientation operation (Vector control)
• Setting the rotation direction (Pr.393 Orientation selection)
Orientation from the current rotation direction (Pr.393 = “0 (initial
value)”) (Vector control)
Pr.393 setting Rotation direction Remarks
0
(initial value)
Pre-orientation Orientation is executed from the current rotation direction.
1 Forward rotation orientation
Orientation is executed from the forward rotation direction.
(If the motor is running in reverse, orientation is executed from the forward
rotation direction after deceleration.)
2 Reverse rotation orientation
Orientation is executed from the reverse rotation direction.
(If the motor is running forward, orientation is executed from the reverse
rotation direction after deceleration.)
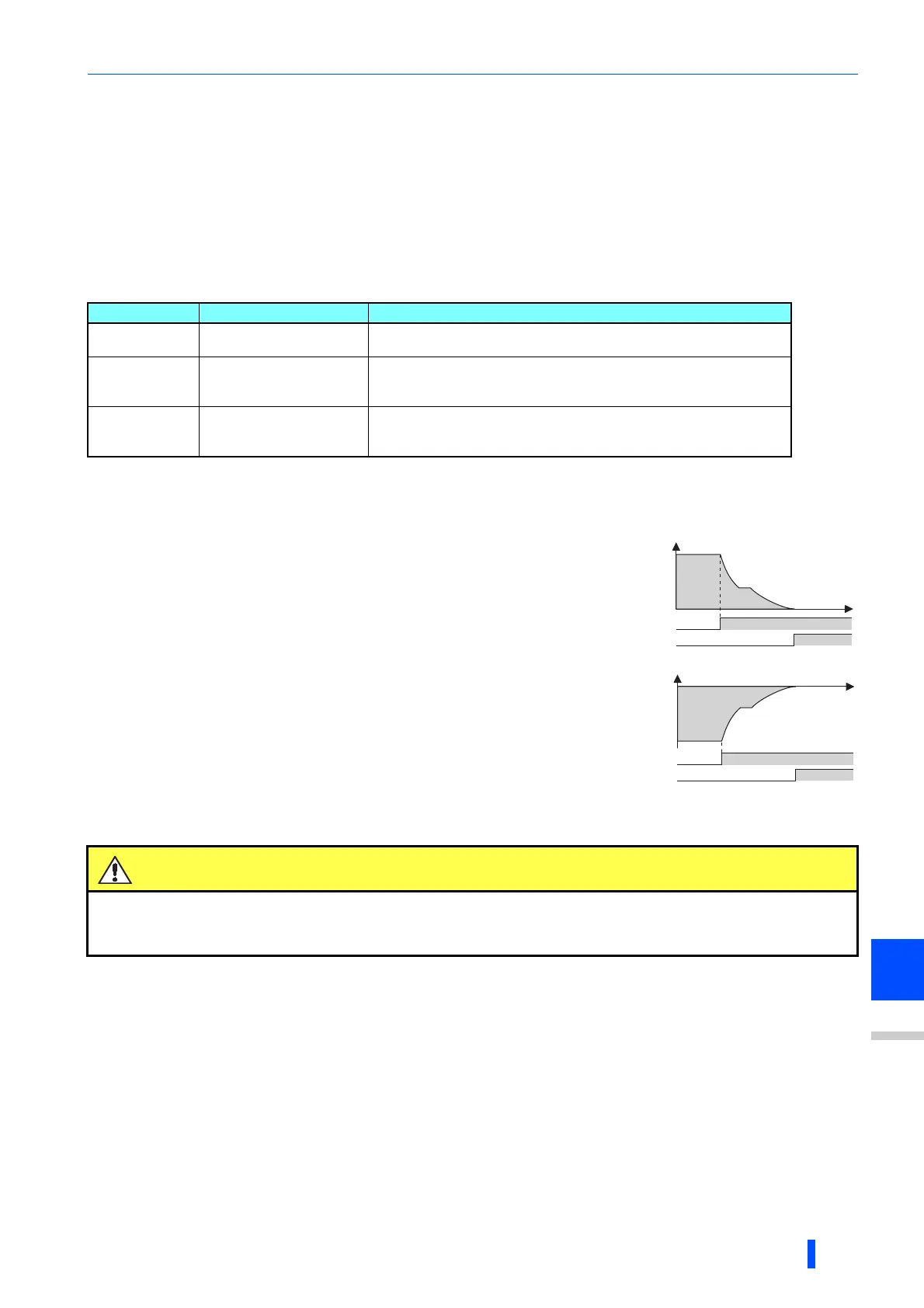
• When the orientation command (X22) is input, the motor speed will decelerate from
the running speed to Pr.351 Orientation speed. At the same time, the orientation
stop position command will be read in. (The stop position command is determined by
the setting of Pr.350 Stop position command selection and Pr.360 16-bit data
selection. Refer to the right chart.)
• When the orientation switchover speed is reached, the encoder Z phase pulse will be
confirmed, and the control will change from speed control to position control (Pr.362
Orientation position loop gain).
• The distance to the orientation stop position is calculated at switching of the control,
and the motor decelerates to a stop with a set deceleration pattern (Pr.399
Orientation deceleration ratio) and enters the orientation (servo lock) state.
• Once in the Pr.357 Orientation in-position zone, the orientation complete (ORA)
signal is output.
• The home position can be moved using Pr.361 Position shift.
CAUTION
If the X22 is turned OFF while the start signal is input, the motor will accelerate toward the speed of
the current speed command. Therefore, to stop, turn the forward rotation (reverse rotation) signal
OFF.
OFF
ON
X22
Speed
(forward
rotation)
OFF
ON
ORA
[t]
OFF
ON
X22
Speed
(reverse
rotation)
OFF
ON
ORA
[t]

 Loading...
Loading...






