BCN-C22005-696
CC-Linkremoteregister
• The torque limit value can be specified in the CC-Link remote register (RWwC to RWwF). (For the details of the
CC-Link remote register, refer to the Instruction Manual of FR-A8NC.)
• When the CC-Link communication (Ver. 2) is used in the quadruple or octuple setting (Pr.544="24, 28, or 128"),
the torque limit value can be input using a remote register (RWwC to RWwF) for each of the four quadrants.
CC-LinkIEFieldremoteregister
• The torque limit value can be specified in the CC-Link IE Field remote register (RWw2). (For the details of the CC-
Link IE Field remote register, refer to the Instruction Manual of FR-A8NCE.)
The value in RWw2 is used as the torque limit value during speed control or position control, and as the torque command value during torque
control. To use the value as the torque limit value, set Pr.810="2".
4 Monitor display with signs
Device
number
Signal name Description
RWwC
Torque
command value
When Pr.544 CC-Link extended setting = "14, 18, 24, 28, 118, or 128" and Pr.804 Torque command
source selection = "3 or 5" during torque control (Real sensorless vector control / vector control), torque
command values can be specified. The value is written to the inverter by RYD or RYE. Pr.805 Torque
command value (RAM) and Pr.806 Torque command value (RAM, EEPROM) are also updated at the
same time. The setting range and the setting increment depend on the Pr.804 setting.
Torque limit
value
When Pr.544 CC-Link extended setting = "14, 18, or 118", Pr.804 Torque command source selection =
"3 or 5", and Pr.810 Torque limit input method selection = "2" during speed control or position control
(Real sensorless vector control / vector control), torque limit values can be specified. The value is written to
the inverter by RYD or RYE. Pr.805 Torque command value (RAM) and Pr.806 Torque command value
(RAM, EEPROM) are also updated at the same time. The setting range and the setting increment depend
on the Pr.804 setting (absolute value).
RWwC,
RWwD,
RWwE,
RWwF
Torque limit level
(2nd quadrant to
4th quadrant)
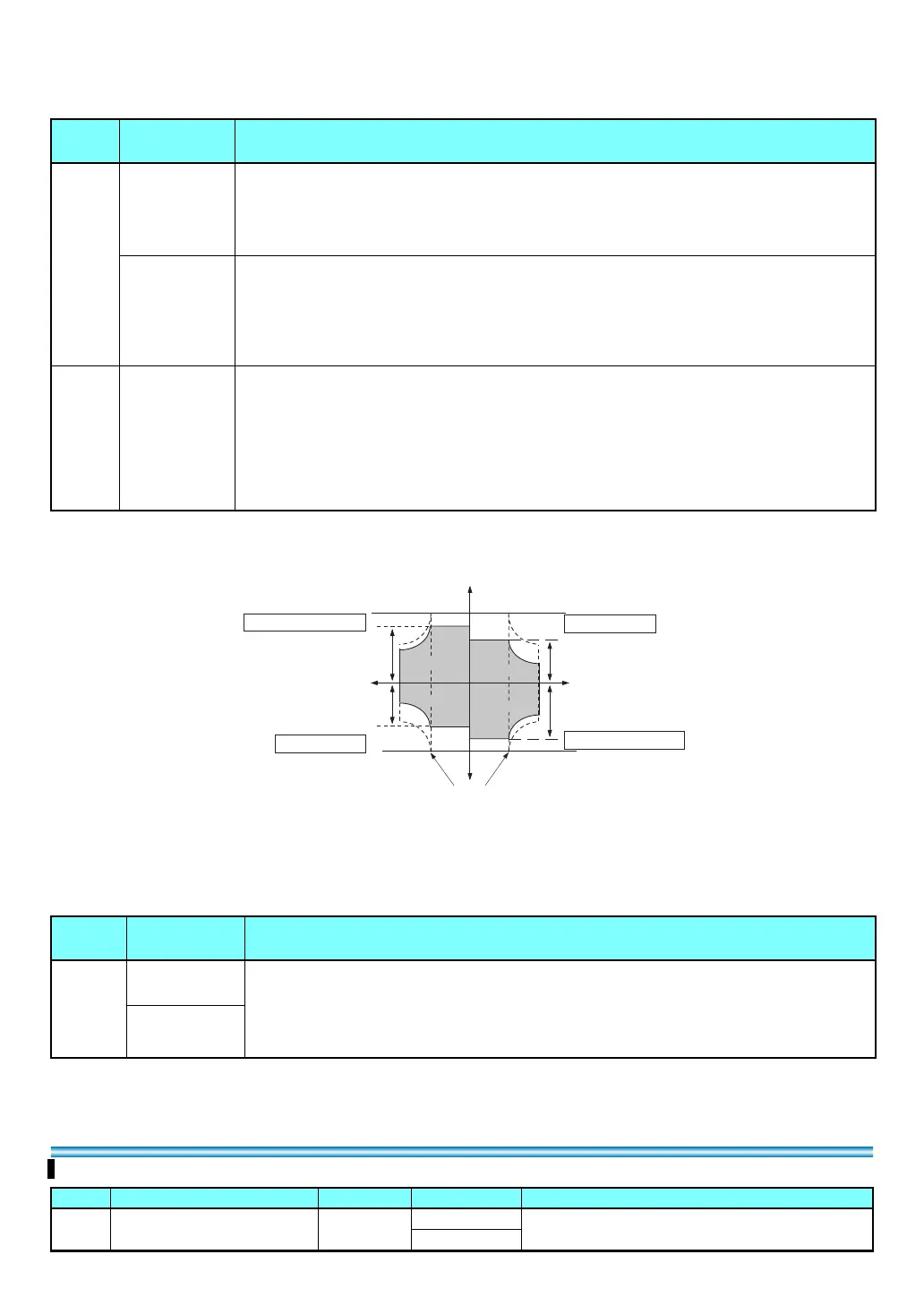
When Pr.544 CC-Link extended setting = "24, 28, or 128" and Pr.810 Torque limit input method
selection = "2" during speed control or position control (Real sensorless vector control / vector control),
torque limit values can be specified for each of the 1st to the 4th quadrants. (Setting range: 0 to 40000 (0 to
400%), setting increment: 0.01%)
The value is written to the inverter by RYD. (EEPROM write by RYE is disabled.)
When "HFFFF" is set in RWwD to RWwF, the RWwC setting is applied to the operation in the target quadrant.
When a value within the setting range of Pr.805 or Pr.806 is entered in RWwC while Pr.804="3 or 5", the
Pr.805/Pr.806 setting is updated.
Device
number
Signal name Description
RWw2
Torque
command value
The torque command value (torque limit value) can be specified. Set Pr.804 Torque command
source selection="1, 3, 5, or 6" to activate the signal under Real sensorless vector control or
vector control. The value is written to the inverter by RY23 or RY24. Pr.805 Torque command
value (RAM) and Pr.806 Torque command value (RAM, EEPROM) are also updated at the
same time. The setting range and the setting increment depend on the Pr.804 setting.
Torque limit
value
• Monitor items to be displayed with minus signs can be selected.
Pr. Name Initial value Setting range Description
1018
M045
Monitor with sign
selection
9999
0
Select items to be displayed with minus signs.
9999
RWwF
RWwE
RWwC
RWwD
Reverse rotation Forward rotation
quad4
quad2
Torque limit
Speed
+
−
Forward regeneration
Forward driving
Reverse regeneration
Reverse driving
quad3
quad1
Rated speed

 Loading...
Loading...






