Speed control under Real sensorless vector control, vector control, PM sensorless vector
control
PARAMETERS
199
5
Pr.3 Base frequency, Pr.19 Base frequency voltage page 598
Pr.72 PWM frequency selection page 277
Pr.80 Motor capacity, Pr.81 Number of motor poles page 164
Pr.125 Terminal 2 frequency setting gain frequency, Pr.126 Terminal 4 frequency setting gain frequency page 415
Pr.359 Encoder rotation direction, Pr.369 Number of encoder pulses page 62
Pr.822 Speed setting filter 1 page 413
Pr.824 Torque control P gain 1 (current loop proportional gain) page 225
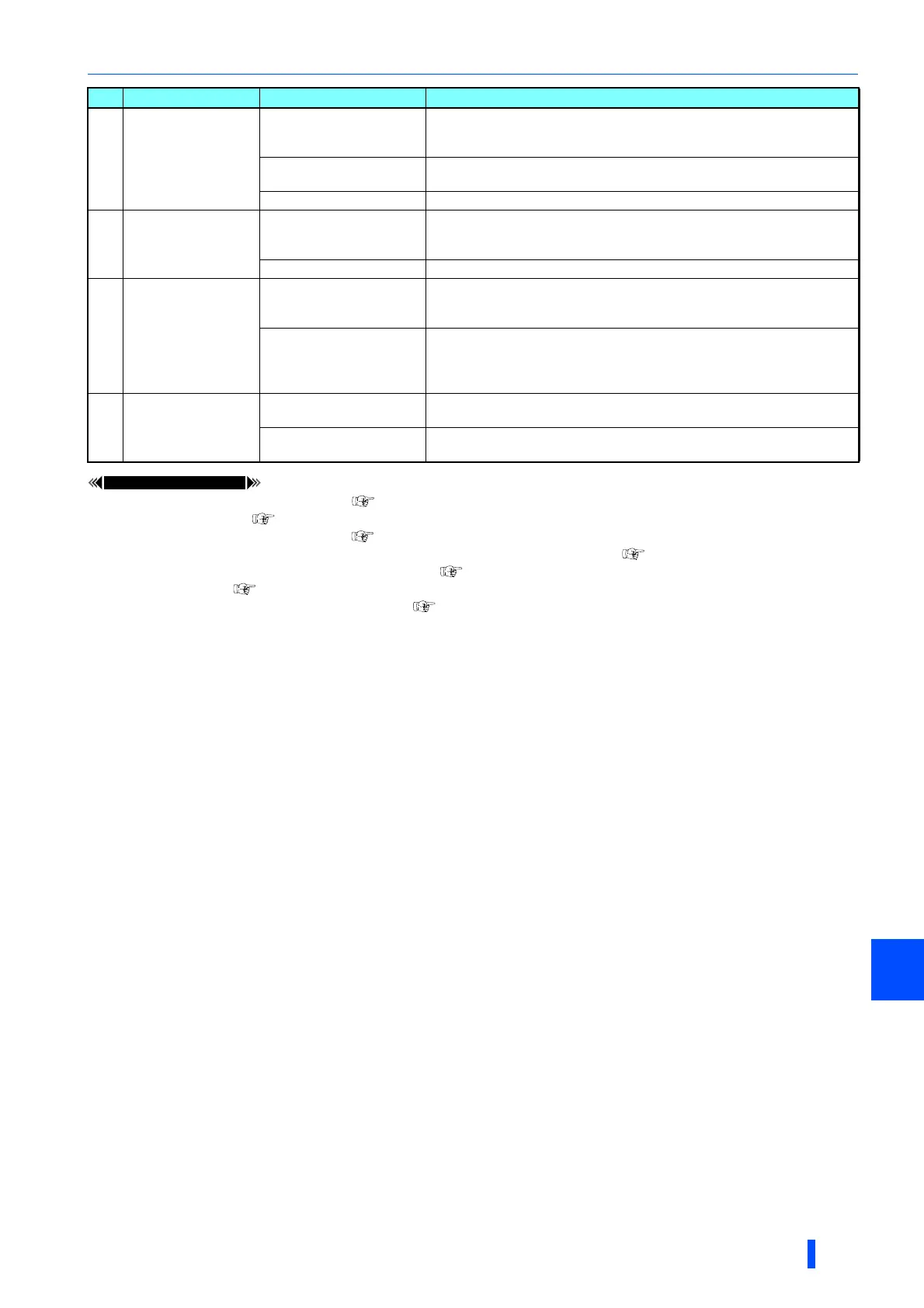
5
Hunting (vibration or
acoustic noise) occurs
in the motor or the
machine.
Speed control gain is too
high.
• Perform easy gain tuning.
•Set Pr.820 lower and Pr.821 higher.
• Perform speed feed forward control or model adaptive speed control.
Torque control gain is too
high.
•Set Pr.824 Torque control P gain 1 (current loop proportional gain)
lower.
Motor wiring is incorrect. • Check the wiring.
6
Acceleration/
deceleration time is
different from the
setting.
Torque shortage.
• Raise the torque limit.
(Refer to the torque limit for speed control on page 185.)
• Perform speed feed forward control.
Load inertia is too high. • Set acceleration/deceleration time suitable for the load.
7
Machine movement is
unstable.
Speed control gain is not
suitable for the machine.
• Perform easy gain tuning.
• Adjust Pr.820 and Pr.821.
• Perform speed feed forward control or model adaptive speed control.
Response is slow because
of the inverter's
acceleration/deceleration
time setting.
• Set the optimum acceleration/deceleration time.
8
Rotation ripple occurs
during the low-speed
operation.
High carrier frequency is
affecting the motor rotation.
•Set Pr.72 lower.
Speed control gain is too
low.
•Set Pr.820 higher.
No. Condition Cause Countermeasure

 Loading...
Loading...






