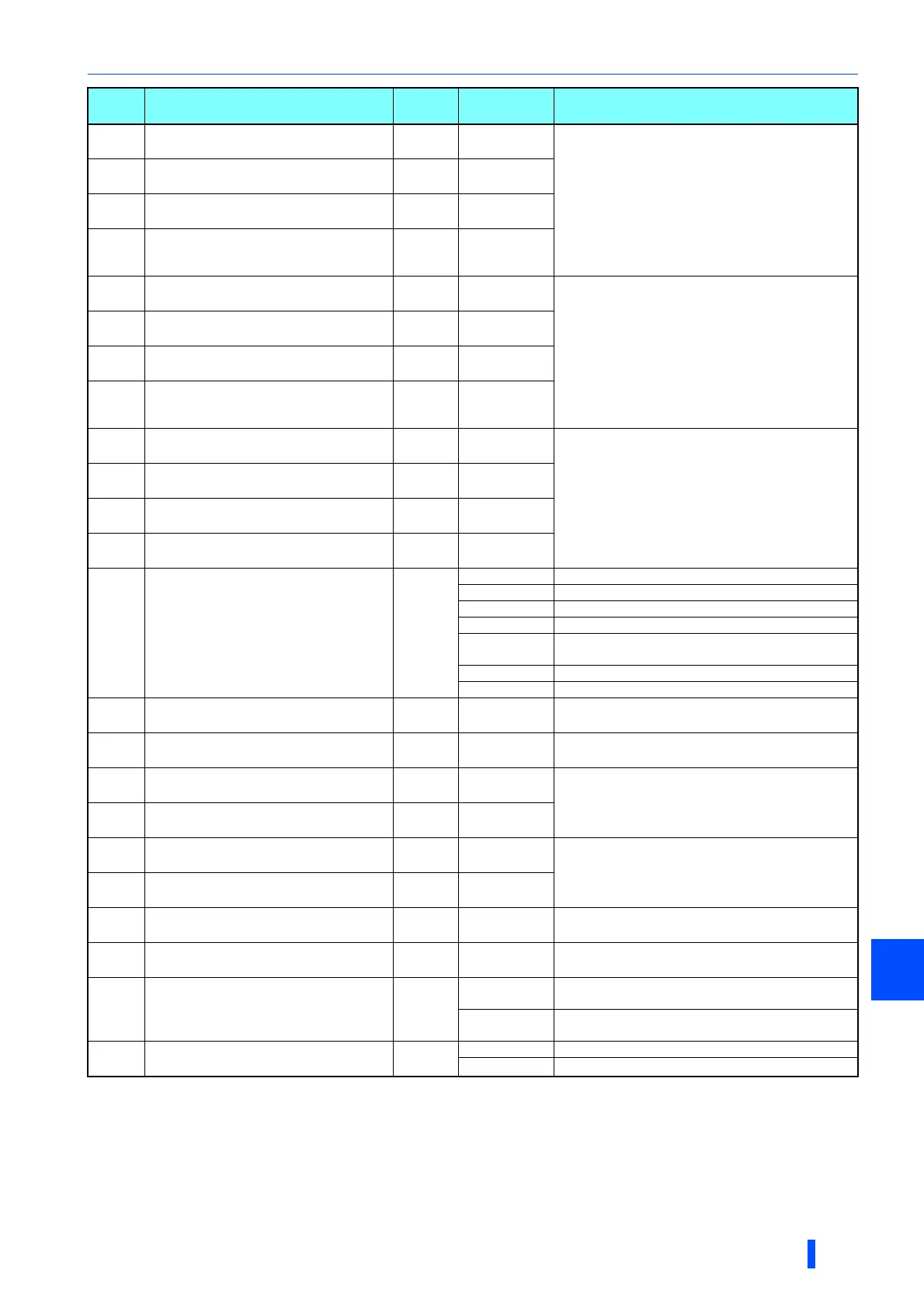
Position control under vector control and PM sensorless vector control
PARAMETERS
235
5
1270
B168
Thirteenth positioning acceleration
time
5 s 0.01 to 360 s
Set the characteristics of the point table 13.
1271
B169
Thirteenth positioning deceleration
time
5 s 0.01 to 360 s
1272
B170
Thirteenth positioning dwell time
0 ms 0 to 20000 ms
1273
B171
Thirteenth positioning sub-function
10
0, 1, 10, 11,
100, 101, 110,
111
1274
B172
Fourteenth positioning
acceleration time
5 s 0.01 to 360 s
Set the characteristics of the point table 14.
1275
B173
Fourteenth positioning
deceleration time
5 s 0.01 to 360 s
1276
B174
Fourteenth positioning dwell time
0 ms 0 to 20000 ms
1277
B175
Fourteenth positioning sub-
function
10
0, 1, 10, 11,
100, 101, 110,
111
1278
B176
Fifteenth positioning acceleration
time
5 s 0.01 to 360 s
Set the characteristics of the point table 15.
1279
B177
Fifteenth positioning deceleration
time
5 s 0.01 to 360 s
1280
B178
Fifteenth positioning dwell time
0 ms 0 to 20000 ms
1281
B179
Fifteenth positioning sub-function
10 0, 10, 100, 110
1282
B180
Home position return method
selection
4
0 Dog type
1 Count type
2 Data set type
3 Stopper type
4
Ignoring the home position (servo-ON position as the
home position)
5 Dog type back end reference
6 Count type front end reference
1283
B181
Home position return speed
2 Hz 0 to 30 Hz Set the speed for the home position return operation.
1284
B182
Home position return creep speed
0.5 Hz 0 to 10 Hz
Set the speed immediately before the home position
return.
1285
B183
Home position shift amount lower 4
digits
0 0 to 9999
Set the home position shift distance.
Home position shift distance = Pr.1286 10000 +
Pr.1285
1286
B184
Home position shift amount upper
4 digits
0 0 to 9999
1287
B185
Travel distance after proximity dog
ON lower 4 digits
2048 0 to 9999
Set the travel distance after detecting the proximity
dog.
Travel distance after the proximity dog = Pr.1288
10000 + Pr.1287
1288
B186
Travel distance after proximity dog
ON upper 4 digits
0 0 to 9999
1289
B187
Home position return stopper
torque
40% 0 to 200%
Set the activation level of torque limit operation for
the stopper-type home position return.
1290
B188
Home position return stopper
waiting time
0.5 s 0 to 10 s
Set the waiting time until home position return is
started after the inverter detects the pressing status.
1292
B190
Position control terminal input
selection
0
0
Sudden stop signal (X87) normally open input (NO
contact input)
1
Sudden stop signal (X87) normally closed input (NC
contact input)
1293
B191
Roll feeding mode selection
0
0 Roll feed disabled
1 Roll feed enabled
Pr. Name
Initial
value
Setting
range
Description

 Loading...
Loading...






