192 Measurement Technique
imc CANSAS Users Manual - Doc. Version 1.9 - 05.12.2014© 2014 imc Meßsysteme GmbH
The frequencies must lie within the range 30m Hz < f < 450 kHz. If the maximum frequency is exceeded
during a measurement, the system returns the input range end value instead of the true measured
values.
The derivative quantities displacement and angle measurement have the following settings:
Choice of one-signal and two-signal encoder
Start of measurement with or without "Zero impulse"
Number of pulses (per unit)
The frequency resolution of the measurement results depends on the input range selected.
Setting the input range:
IncrementalEncoder0x > Index card "Inputs" > Combo box "Input range"
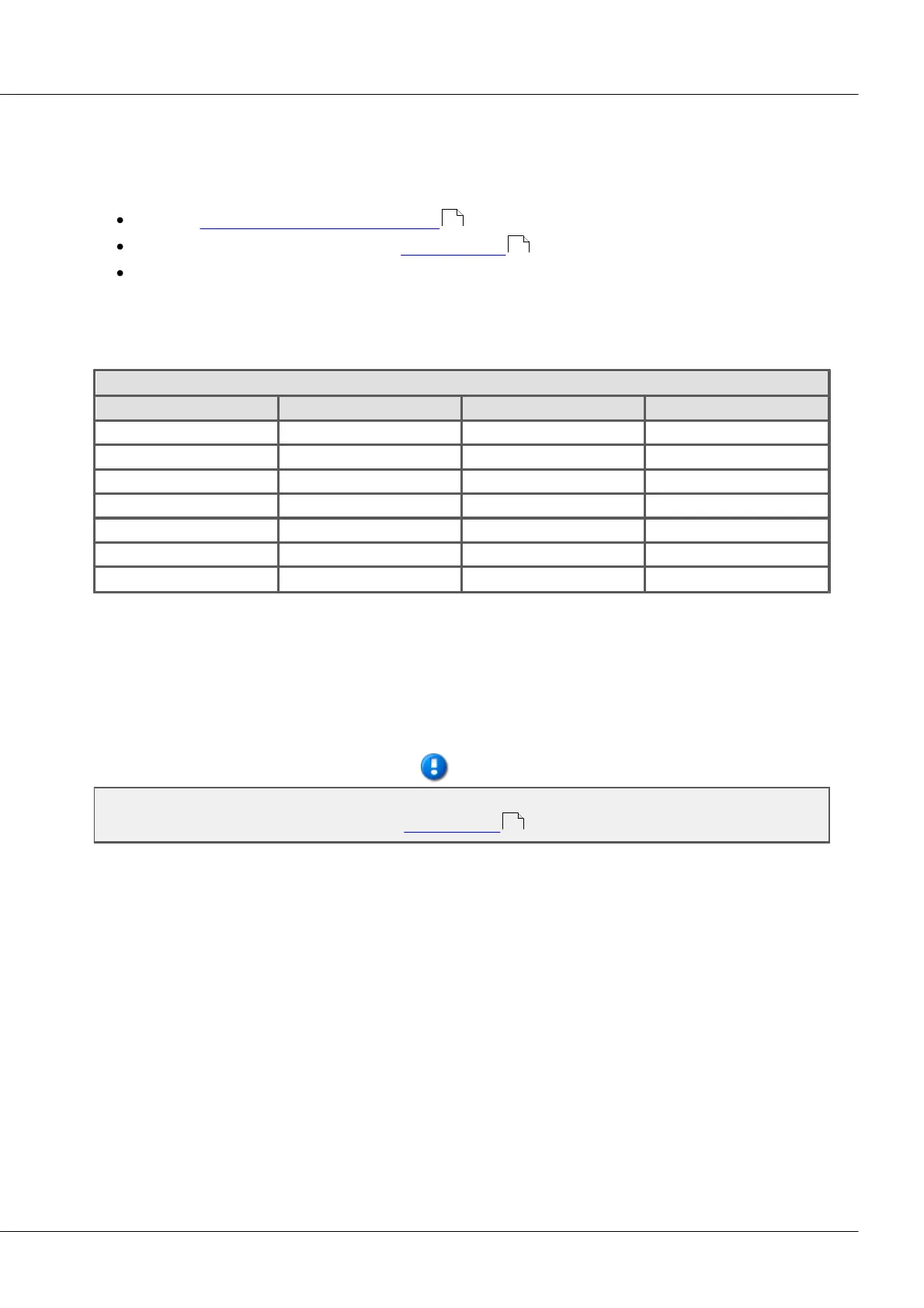
Input ranges and the corresponding frequency resolutions
The input ranges and resolutions for the RPM or velocity also depend on the number of encoder pulses
set. If the number of pulses is known, the RPM and velocity values can easily be computed using the
above table according to:
RPM:
Input range = ([Frequency input range in Hz] * 60 / [Encoder pulses per revolution]) in RPM
Resolution = ([Frequency resolution in Hz] * 60 / [Encoder pulses per revolution]) in RPM
If you use a counter which indicates this zero position by a missing cog, you will avoid seeing gaps in the
signal by means of the measurement mode Missing tooth .
Velocity:
Input range = ([Frequency input range in Hz] / [Encoder pulses per m]) in m/s
Resolution = ([Frequency resolution in Hz] / [Encoder pulses per m]) in m/s
198
198
199