336 Properties of the Modules
imc CANSAS Users Manual - Doc. Version 1.9 - 05.12.2014© 2014 imc Meßsysteme GmbH
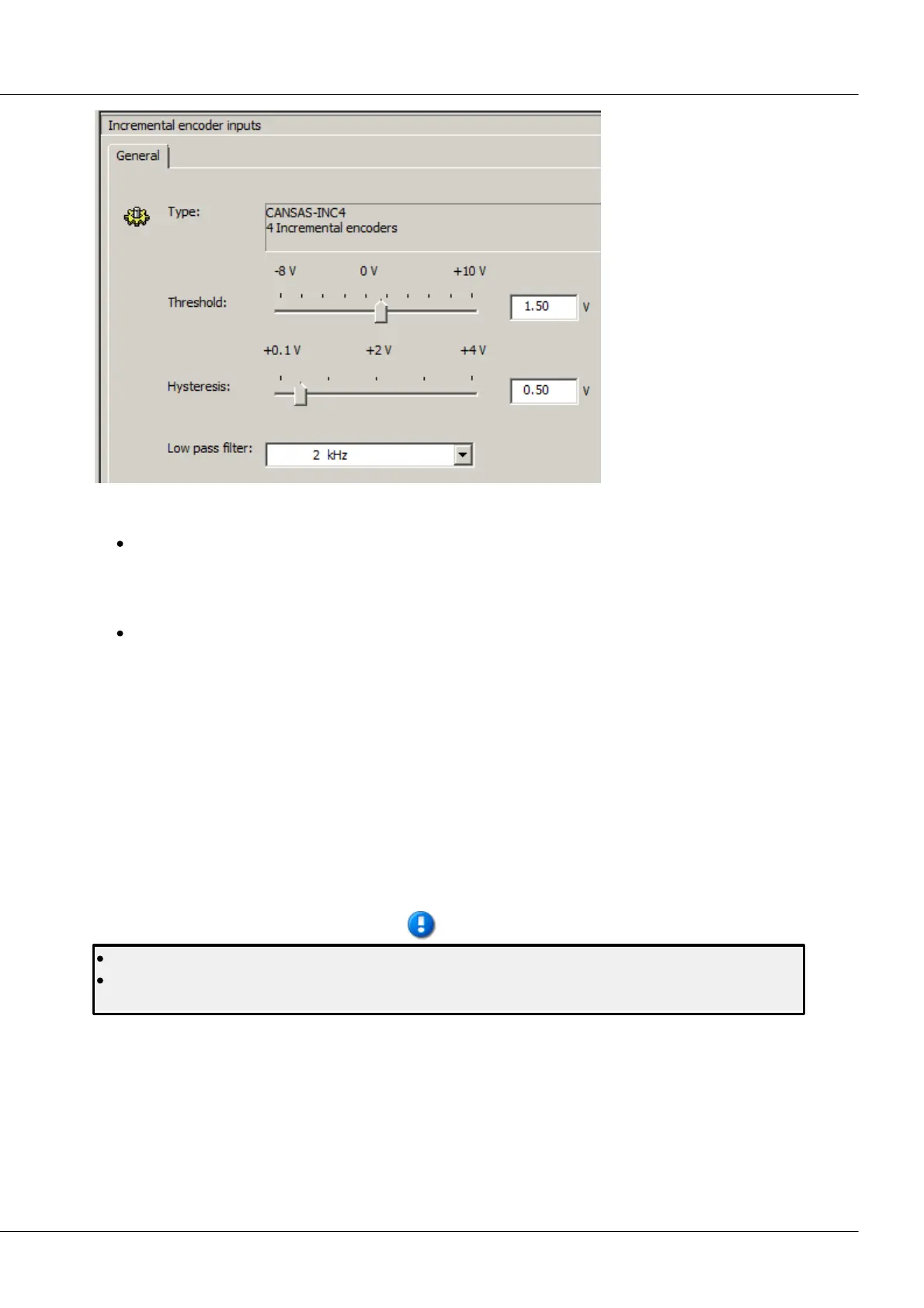
The conditioning set is valid for all 4 incremental encoder channels, as well as for the index-channel
(zero impulse). The only exception is that the index channel has a fixed frequency filter (20 kHz).
Note on setting the threshold:
Note that the input voltage range is only -8 V..+10 V. Thus, a threshold of +10 V is possible, but not
recommendable. To avoid overloading the input amplifier (from which it can only recover slowly), a
divider should be connected for high input voltages.
Note on setting the hysteresis below 300 mV (out of specification):
Setting the hysteresis below 300 mV is possible, but it is not recommended unless the input signal
amplitude is below 1 V in all active incremental counter channels of a module. Lower hysteresis
settings combined with larger input signals may result in an input signal falsely registering in more
than one channel.
6.12.3 Sensor types, synchronization
Zero impulse (Index signal) denotes the synchronization signal SYNC which is globally available to all four
channels in common. If measurement mode with Zero impulse channel has been selected (e.g. Angle
(diff) One Signal & Zero impulse), the following conditions apply: After the start of a measurement the
counters remain inactive until the first positive slope arrives at +INDEX. This arrangement is independent
of the release-status of the Start-trigger condition.
The pins for the zero impulse (index) is connected to CON1 only!
The zero impulse is only considered after configuring or reboot of the imc CANSAS INC4. A
restart of the measurement without restart of the imc CANSAS does not reset the index channel!
Incremental encoder sensors often have an index track (index signal, zero marker pulse) which emits a
synchronization-signal once per revolution. The SYNC-input is differential and set by the comparator
settings. Its bandwidth is limited to 20 kHz by a permanently low-pass filter. If the input remains open, an
(inactive) HIGH-state will set in.
The measurement types Linear Motion, Angle, RPM and Velocity are especially well adapted for direct
connection to incremental encoder-sensors. These consist of a rotating disk with fine gradation in
conjunction with optical scanning and possibly also with electric signal conditioning.