RM0402 Rev 6 927/1163
RM0402 Controller area network (bxCAN)
966
28.5 Test mode
Test mode can be selected by the SILM and LBKM bits in the CAN_BTR register. These bits
must be configured while bxCAN is in Initialization mode. Once test mode has been
selected, the INRQ bit in the CAN_MCR register must be reset to enter Normal mode.
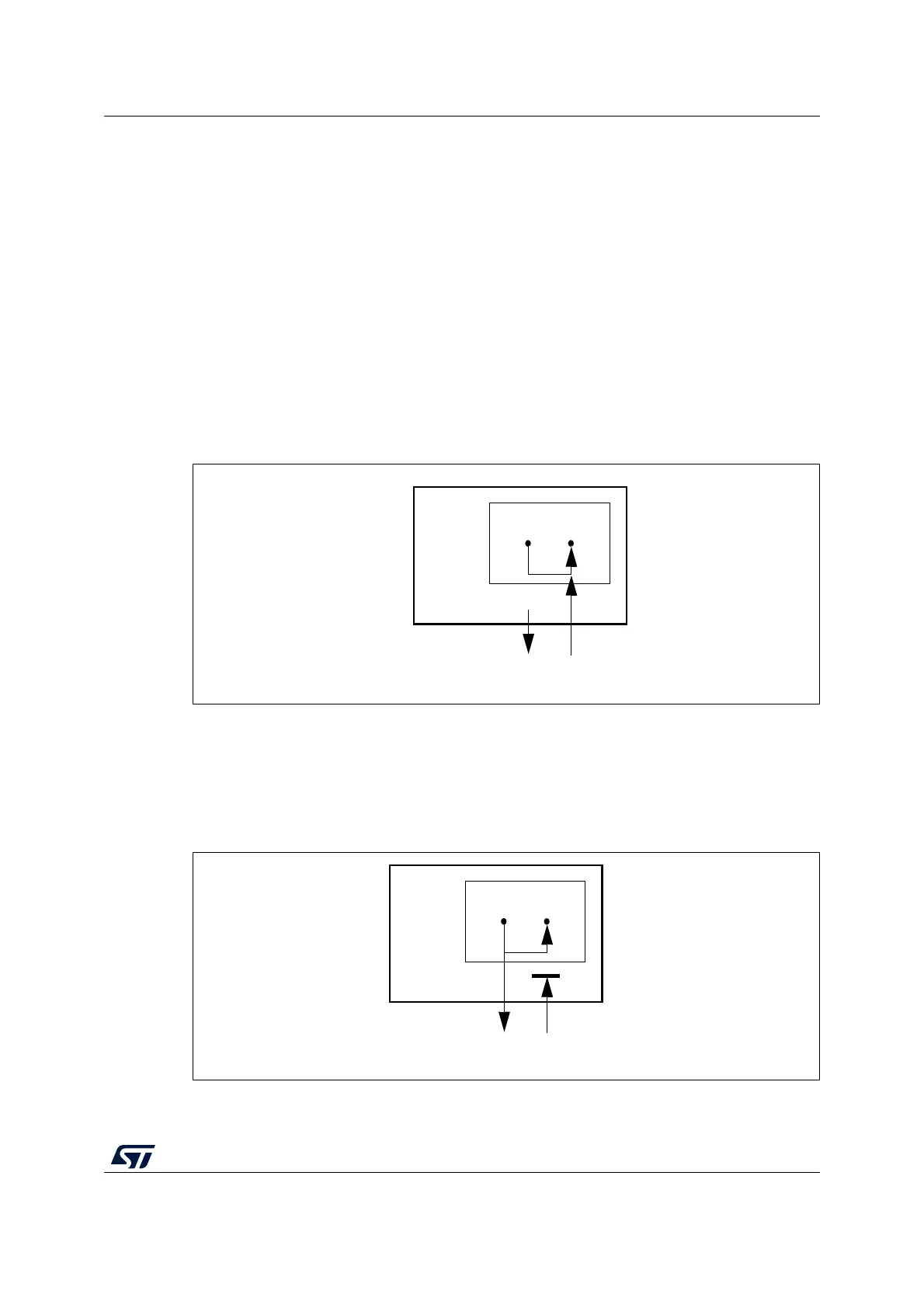
28.5.1 Silent mode
The bxCAN can be put in Silent mode by setting the SILM bit in the CAN_BTR register.
In Silent mode, the bxCAN is able to receive valid data frames and valid remote frames, but
it sends only recessive bits on the CAN bus and it cannot start a transmission. If the bxCAN
has to send a dominant bit (ACK bit, overload flag, active error flag), the bit is rerouted
internally so that the CAN Core monitors this dominant bit, although the CAN bus may
remain in recessive state. Silent mode can be used to analyze the traffic on a CAN bus
without affecting it by the transmission of dominant bits (Acknowledge Bits, Error Frames).
Figure 321. bxCAN in silent mode
28.5.2 Loop back mode
The bxCAN can be set in Loop Back Mode by setting the LBKM bit in the CAN_BTR
register. In Loop Back Mode, the bxCAN treats its own transmitted messages as received
messages and stores them (if they pass acceptance filtering) in a Receive mailbox.
Figure 322. bxCAN in loop back mode
bxCAN
CANTX CANRX
Tx Rx
=1
MS30393V2
bxCAN
CANTX CANRX
Tx Rx
MS30394V2