Final Adjustment
4-22 Manual # 42-02-7223
1. Place the car on Independent service
and move the car to the landing at
which the test weights are stored.
2. Open the iView Virtual Oscilloscope
and select Load Weigher (Raw) on
Test point 1.
3. With the car empty, verify that the
Test point 1 reading is at least 0.5 but
not greater than 1.5.
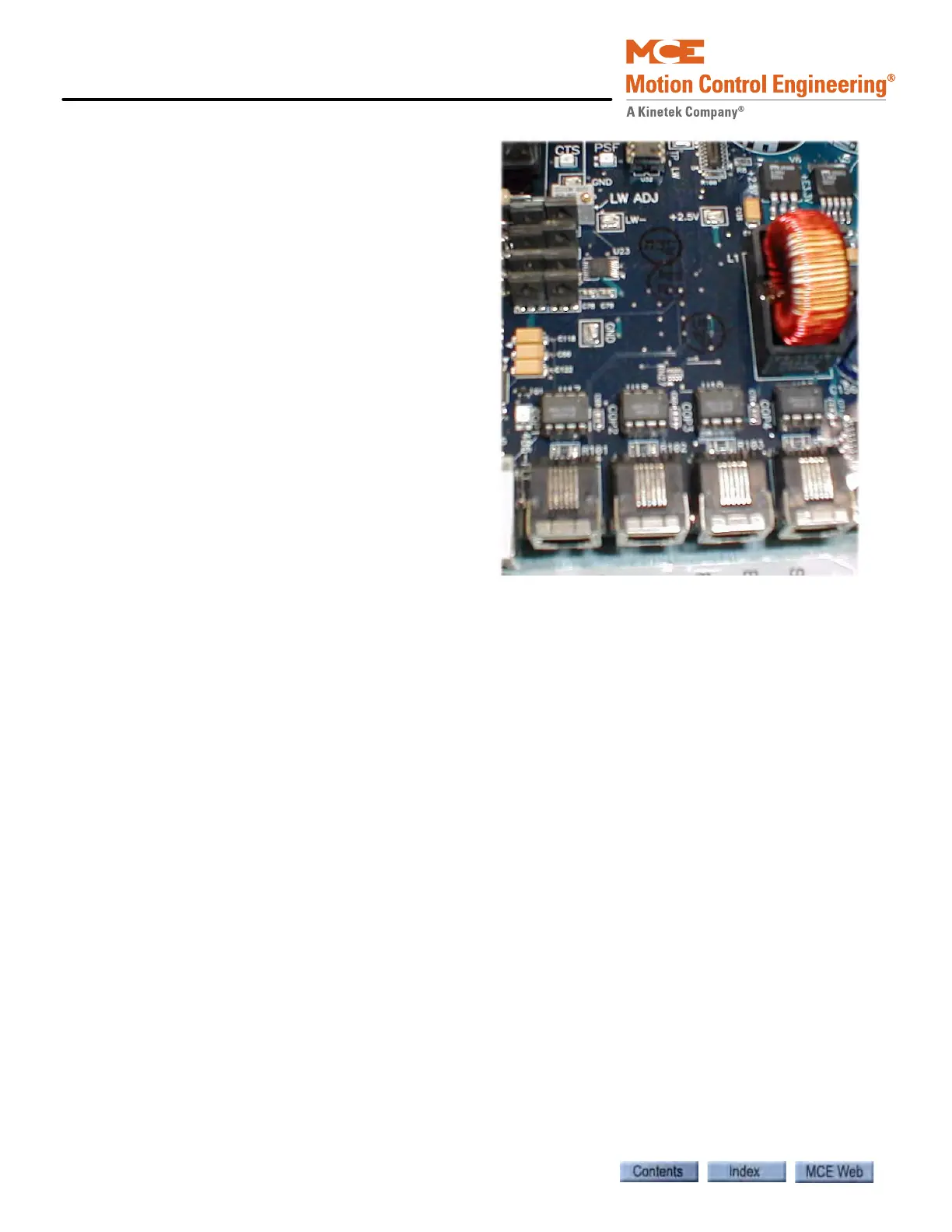
4. Place a full load in the car. Verify that
the Test point 1 value is now between
5.5 and 8.0. If necessary, adjust trim-
pot LW ADJ on the CTP (cartop)
board in the iLink enclosure to achieve
the correct reading.
Pretorque Gain Adjustments
1. Place a balanced load in the car (the balanced load weight recorded when performing
the Counterweight Balancing procedure). Please refer to “Counterweight Balancing” on
page 3-29.
2. With the car in Test mode (iBox TEST switch ON) move the car to the top floor.
3. On the Configuration > Drive > Pre-Torque tab, enable the Pretorque option and send
the new selection to iControl.
4. On the Virtual Oscilloscope, select Load Weigher Balanced on Test point 1. If necessary,
adjust the windows so that you can see the oscilloscope and the Pre-Torque parameters
at the same time.
5. On the Configuration > Drive > Pre-Torque tab, adjust the Pretorque balance adjust-
ment parameter until the digital readout for Test point 1, Load Weigher Balanced, is
equal to or as close to zero (0.0) as possible.
6. If Error compensation, on the Configuration > Drive > Control tab, was increased to
compensate for rollback, you may lower the value now.
7. Verify that Pretorque position compensation, on the Drive > Pre-torque tab is set to 0.0.
If necessary, set it to 0.0 and Send it to the controller.
8. Verify that Pretorque gain, on the Drive > Pre-torque tab, is 0.0. If necessary, set it to
0.0 and Send it to the controller.
9. On the Configuration > Brake > Control tab, increase the value of Speed Pick Delay 1 to
2.0 seconds so that any rollback is easily detected.
10. Remove the weights from the car and move the car to one floor below the top landing.
11. Make a one-floor-run down. Check for rollback by either watching the motor or by mon-
itoring the Speed Feedback signal on the Virtual Oscilloscope.