Drive Startup (System 12 SCR Drive)
2-65
2
iControl DC
Car Response and Speed Loop Gain (System 12 SCR Drive)
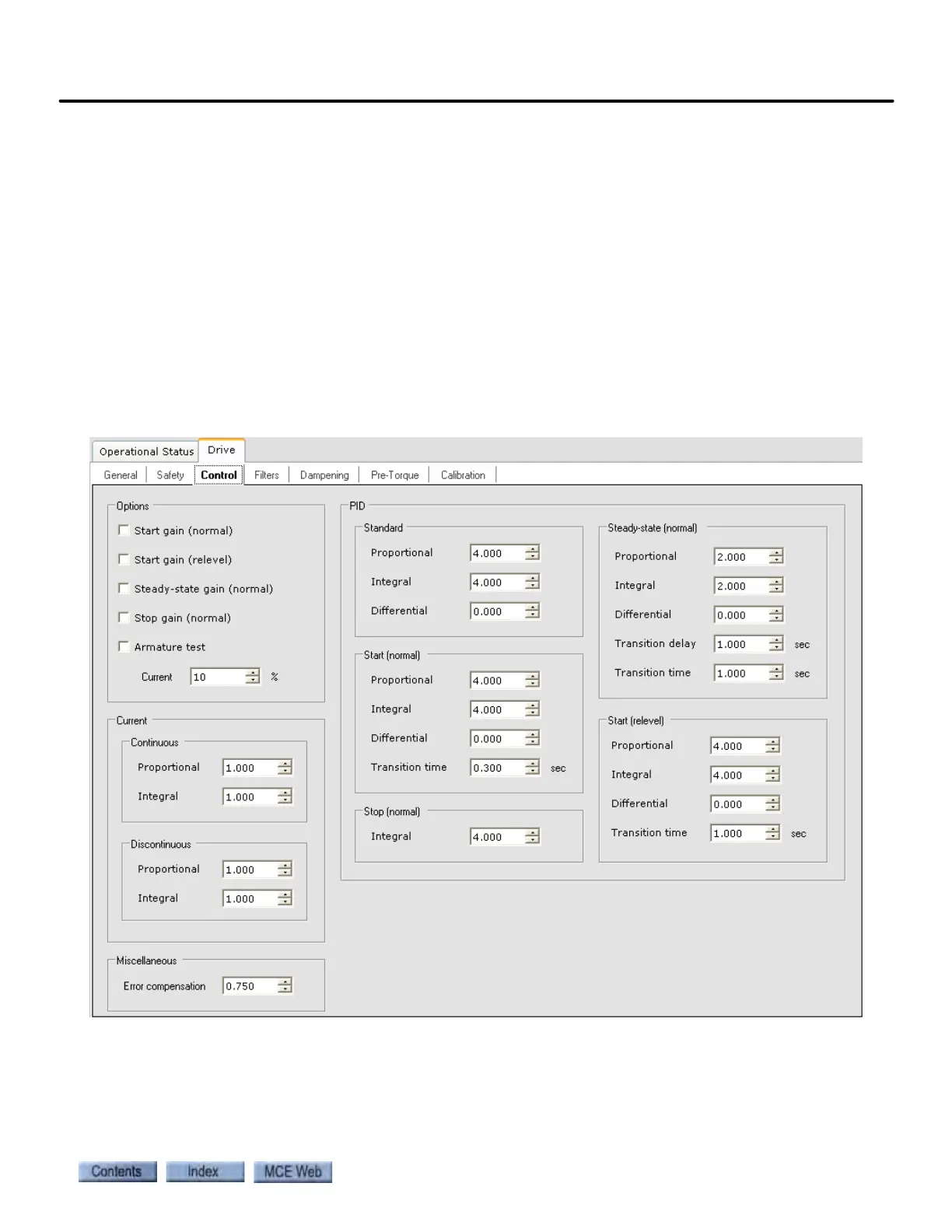
Only if necessary, car response may be stiffened by increasing PID-Standard Integral error
and/or Proportional error on the Configuration > Drive > Control tab. At this point, it is only
necessary to prevent the car from sagging severely. Do not attempt fine tuning yet.
Increasing Standard Integral or Proportional gain provides stiffer response while decreasing
them dampens and loosens response. If too little Integral gain (close to 0) is used, the car will
drift when the brake is lifted and control may be sloppy during all aspects of operation, or
severely affected by varying loads. Too much Integral gain and/or Proportional gain will cause
unstable operation, violent oscillation, or overshoot. If some vibration is encountered through-
out the run, increase Speed Control, Armature voltage/Dampening-speed (Configuration >
Drive > Dampening tab) by 0.01 until the oscillation stops (adding Dampening speed voltage
will add lag to the system). Integral gain must be a value greater than 0.0. Otherwise, there may
be a steady-state speed error.