Rockwell Automation Publication 2198-UM004D-EN-P - December 2022 233
Chapter 10
Modes of Operation
The following sections describe the operation of each mode, including the
mode structure, command source, selection and processing of the command,
and gain adjustment.
Topic Page
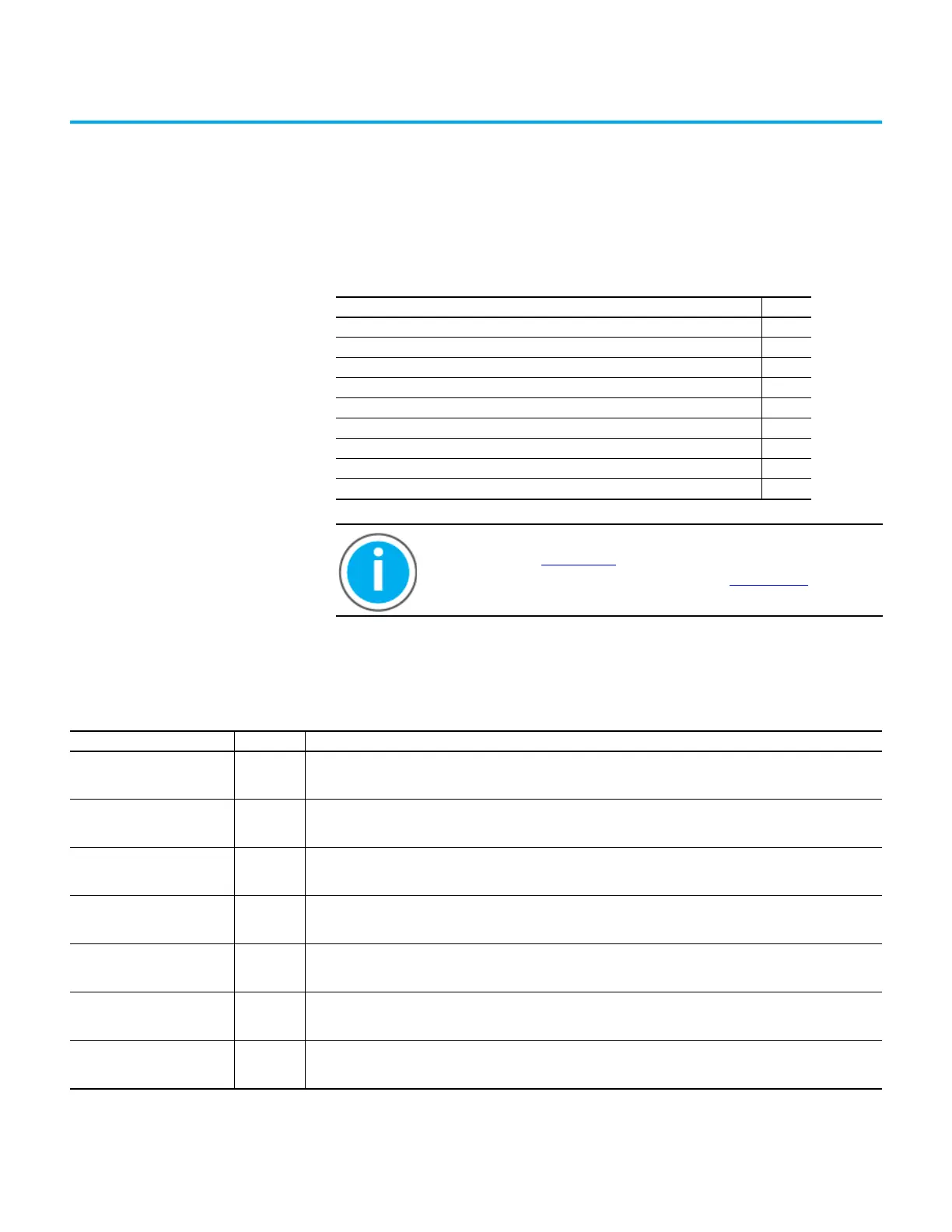
Select Operation Mode and Direction Control 234
Position Control 236
Speed Mode 246
Torque Mode 252
Filter 256
Speed and Torque Limit Functions 263
Dual and Multi-modes 269
IO Mode 271
Analog Outputs and Monitoring 282
This manual links to Kinetix® 5100 Servo Drive Fault Codes Reference
Data, publication 2198-RD001
, for fault codes and Kinetix 5100 Servo
Drive Parameters Reference Data, publication 2198-RD002
, for
parameters. Download the spreadsheets now for offline access.
Table 86 - Kinetix 5100 Drive Control Modes
Control Mode Short Name Description
Position mode (I/O terminal block
input)
PT
This mode is sometimes referred to as Pulse Train Output or Step and Direction. The servo drive receives the Position
command and commands the motor to run to the target position. The Position command is communicated through the I/
O terminal block and the signal type is pulse.
Position mode (register input) PR
This mode contains the drive indexing capabilities. The servo drive receives the Position command and commands the
motor to run to the target position. Position commands are issued from the program registers (99 sets in total). You can
select the register number with binary-weighted DI signals or through communication.
Speed mode S
The servo drive receives the Speed command and commands the motor to run at the target speed. The Speed command
is issued from preset speed internal registers (3 sets in total) or by analog voltage (-10V…+10V) that is communicated
through the analog inputs on the I/O terminal block. You can select the command with binary-weighted DI signals.
Speed mode (no analog input) Sz
The servo drive receives the Speed command and commands the motor to run at the target speed. The Speed command
can only be issued from the preset speed internal registers (4 sets in total, one is fixed at 0). You can select the
command with binary-weighted DI signals.
Torque mode T
The servo drive receives the Torque command and commands the motor to run using the target torque. The Torque
commands can be issued from the preset torque internal registers (3 sets in total) and by analog voltage (-10V…+10V)
that is communicated through the I/O terminal block. You can select the command with binary-weighted DI signals.
Torque mode (no analog input) Tz
The servo drive receives the Torque command and commands the motor to run using the target torque. The Torque
command can only be issued from the preset torque internal registers (4 sets in total, one is fixed at 0). You can select
the command with binary-weighted DI signals.
IO mode IO
The servo drive receives commands from the Logix controller through the EtherNet/IP network Class 1 connection.
Commands are issued through the Add-On Profile (AOP) and uses the Add-On Instruction instructions in the Logix
Designer application.

 Loading...
Loading...









