254 Rockwell Automation Publication 2198-UM004D-EN-P - December 2022
Chapter 10 Modes of Operation
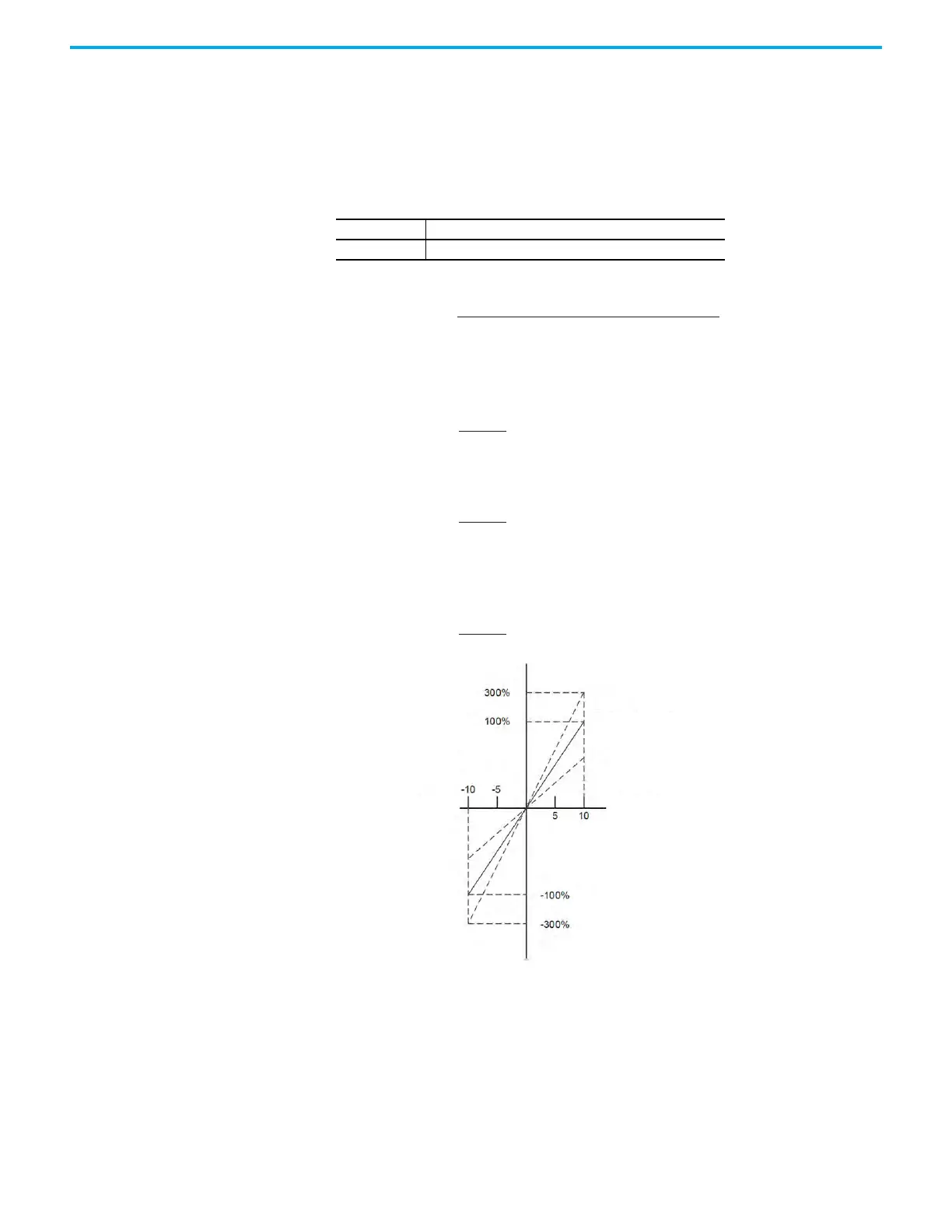
Scaling of Analog Command (Torque Mode)
The motor torque command is controlled by the analog voltage difference
between the T_REF and GND analog signals. The torque slope and its range
can be adjusted by the Analog to Torque Scale parameter.
Motor torque command is based on the following equation:
If the ID148 (P1.041) parameter is set at its default setting of 100 and the
external analog input voltage is 10V, the torque command is 100% of the rated
torque.
If the ID148 (P1.041) parameter is set to 300 and the external analog input
voltage is 10V, the torque command is 300% of the rated torque.
If the ID148 (P1.041) parameter is set at its default setting of 100 and the
external analog input voltage is 5V, the torque command is 50% of the rated
torque.
In Speed, PT and PR Modes set the torque limit corresponding to 10V (max.
voltage) for analog torque limit.
Table 92 - Relevant Parameter
Parameter Name
ID148 (P1.041) AnalogToTorqueScale
Torque control command = = Unit %
External analog input voltage x ID148 (P1.041) setting value
S
l
o
p
e
i
s
s
e
t
b
y
I
D
1
4
8
(
P
1
.
0
4
1
)
A
n
a
l
o
g
v
o
l
t
a
g
e
i
n
p
u
t
(
V
)
T
o
r
q
u
e
c
o
m
m
a
n
d

 Loading...
Loading...









