Rockwell Automation Publication 2198-UM004D-EN-P - December 2022 285
Chapter 11
Motion Control in PR Mode
This chapter provides information about how to use the PR (Position Register)
Operation Mode. In this mode, commands are executed based on the internal
registers (called PRs) of the servo drive. Various commands are available,
including Homing, Speed, Position, Jump, Write, Index Position, and
Arithmetic operation. This chapter contains detailed description of each
command.
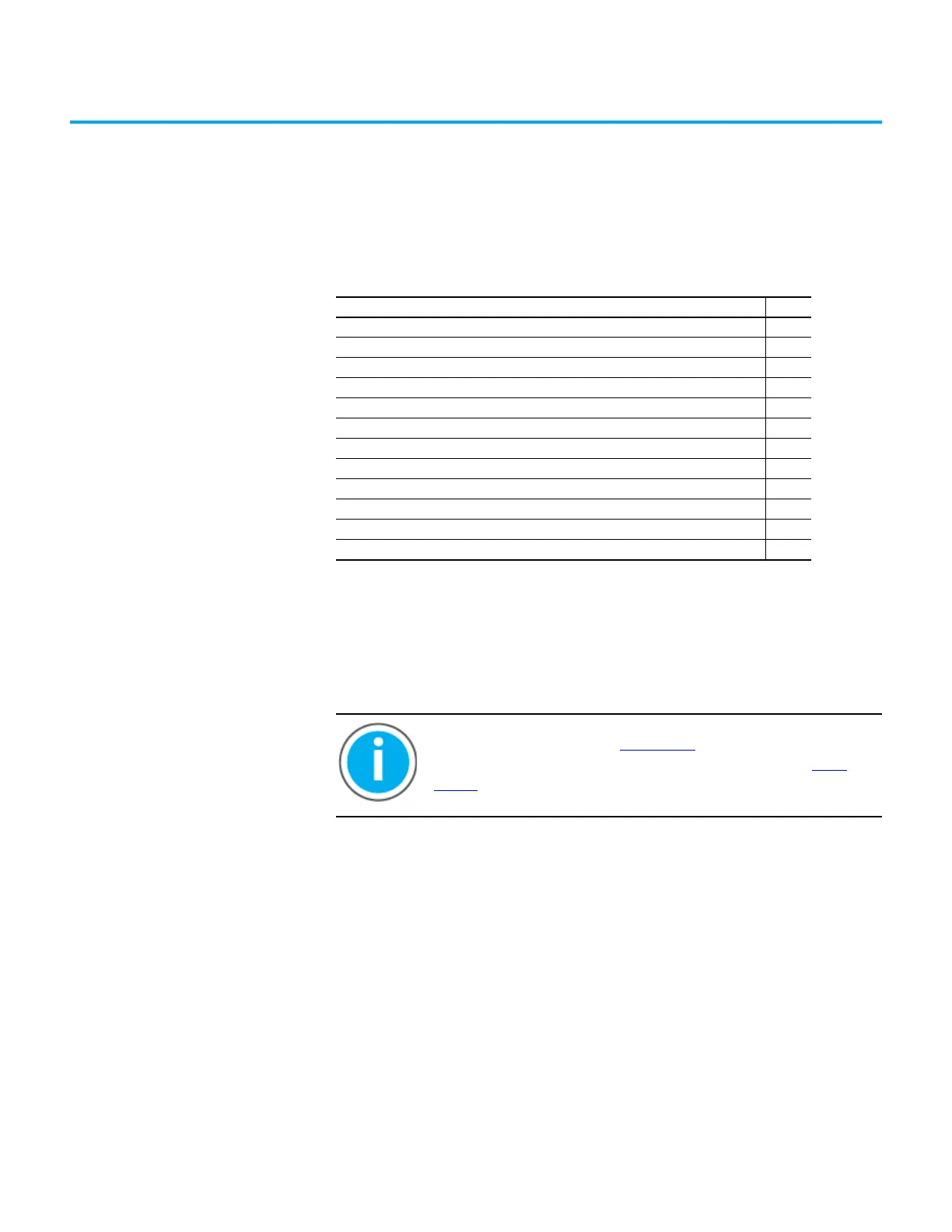
Topic Page
Detailed Operation in PR Mode 286
Homing 298
Constant Speed Control 324
Position Control Command 326
Jump Command 329
Write Command 331
Index Position Command 333
Arithmetic Operations Commands 339
Use the PR Mode Editor in KNX5100C Software 342
Display of PR Procedure in KNX5100C Software 348
Trigger Method for PR Commands 354
PR Execution Process 358
This manual links to Kinetix® 5100 Servo Drive Fault Codes
Reference Data, publication 2198-RD001
, for fault codes and Kinetix
5100 Servo Drive Parameters Reference Data, publication 2198-
RD002, for parameters. Download the spreadsheets now for offline
access.

 Loading...
Loading...









