Rockwell Automation Publication 2198-UM004D-EN-P - December 2022 169
Chapter 7 Configure the Drive with KNX5100C Software
Configure Electronic Gear (E-Gear) Ratio
The E-Gear ratio configuration is important and serves two purposes
depending on the Operation Mode:
• PT Operation mode/IO mode - (raC_xxx_K5100_MAG Add-On
Instruction only). The E-Gear ratio represents a pulse-pulse relationship
between a master and slave source (Pulse-Pulse follower). In this mode,
the drive internally has no conversion constant (counts/mm or inch), any
user position conversions must be considered as pulses.
• PR Operation Mode/IO mode. When in this mode, the E-Gear ratio
represents Position Scaling (PUU). This mode allows you to define the
number of feedback counts/motor rotation.
Regardless of the Operation Mode, the E-Gear ratio is always used to provide
either a representation of Position Scaling (PUU) or a Pulse Following
relationship.
If you change the gear ratio in your application, when servo is off, you can
define multiple numerators but only one denominator. The numerator of the
E-Gear ratio can be selected via the DI.GNUM0 and DI.GNUM1 signals. If the
DI.GNUM0 and DI.GNUM1 signals are not defined, ID151 (P1.044) is the
default numerator. To avoid mechanical vibration, switch the DI.GNUM0 and
DI.GNUM1 signals during servo off status.
See Description of Digital Input Functions
on page 433.
Table 72 - Relevant Parameters
(1)
(1) Do not change the setting value in servo on state.
Parameter Name
ID151 (P1.044) GearRatioslaveCountsN1
ID236 (P2.060) GearRatioslaveCountsN2
ID237 (P2.061) GearRatioslaveCountsN3
ID238 (P2.062) GearRatioslaveCountsN4
ID152 (P1.045) GearRatioMasterCounts (denominator)
ID170 (P1.068) PositionCmdMovingFilterTime
IMPORTANT
– If you change gear ratio during operation, you can cause an abrupt, uncontrolled
motion event.
– ID236 (P2.060), ID237 (P2.061), and ID238 (P2.062) are for PT Mode only. ID151 (P1.044) is
for both PR Mode and PT Mode. All of the parameters can be changed in PT Mode only.
– If PT/PR Mode is selected, and ID151 (P1.044) is changed in PT Mode, it remains active
through any subsequent execution if you switch to PR Mode.
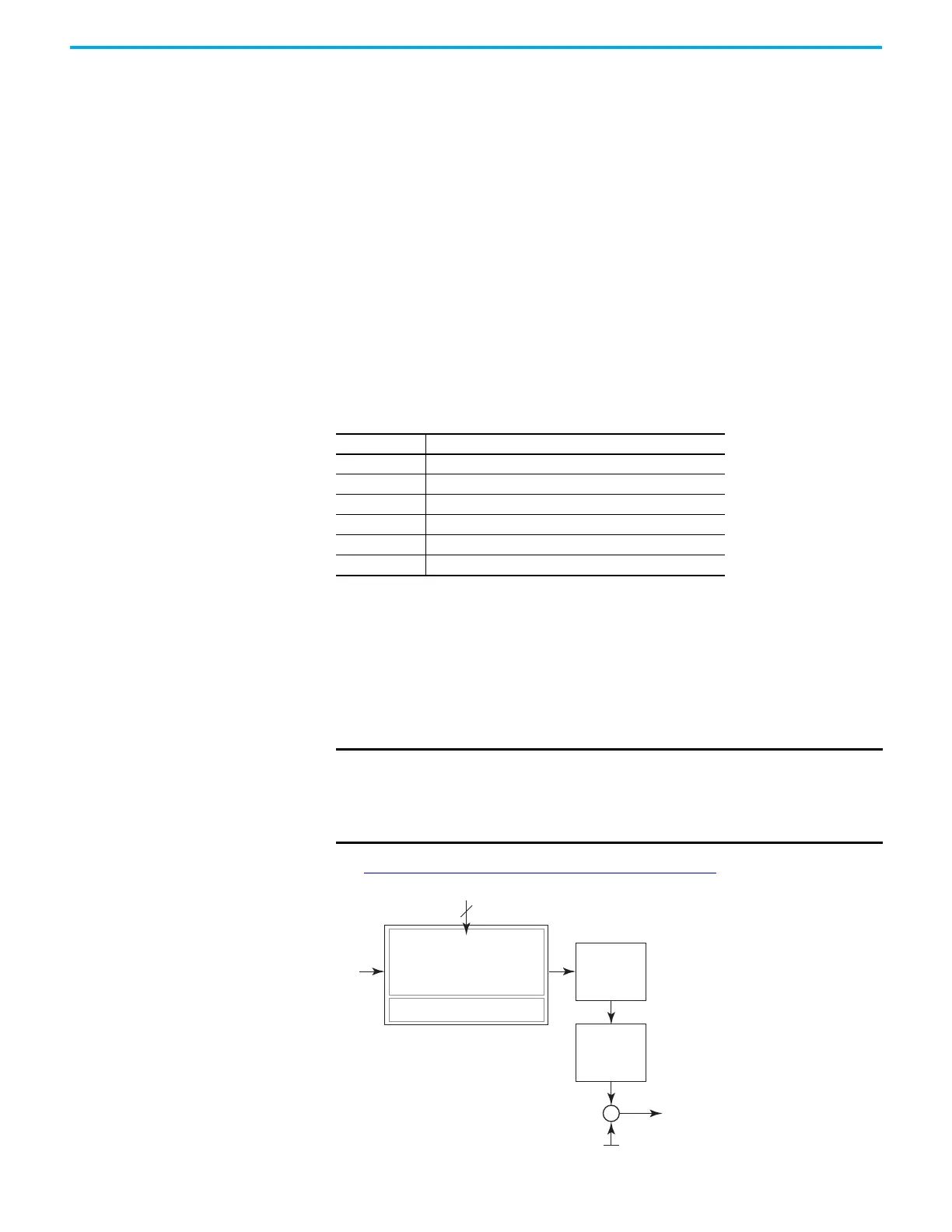
Position Command
Moving Filter
Time Constant
ID170 (P1.068)
GearRatioFollowerCounts N1 - ID151 (P1.044)
GearRatioFollowerCounts N2 - ID236 (P2.060)
GearRatioFollowerCounts N3 - ID237 (P2.061)
GearRatioFollowerCounts N4 - ID238 (P2.062)
GearRatioMasterCounts - ID152 (P1.045)
Numerators
Denominator
Position Command
Low Pass Filter
Time Constant
ID124 (P1.008)

 Loading...
Loading...









