146 Rockwell Automation Publication 2198-UM004D-EN-P - December 2022
Chapter 7 Configure the Drive with KNX5100C Software
4. Click Accept if you want to use those values, or click Cancel if you want to
stay with the parameters that you added manually.
Selection of Motor Thermal Models
The Kinetix 5100 drives contain two motor thermal-overload protection
algorithms that are used to prevent the motor from overheating.
Generic Motors
The default thermal model is a generic I2 T Class 10 overload protection
algorithm. This model is active if the MotorWindingToAmbientResistance
ID635 (PN.007) or the MotorWindingToAmbientCapacitance ID636 (PN.008)
values are 0.0. The purpose of this algorithm is to limit the time a motor is
operating with excessive levels of current.
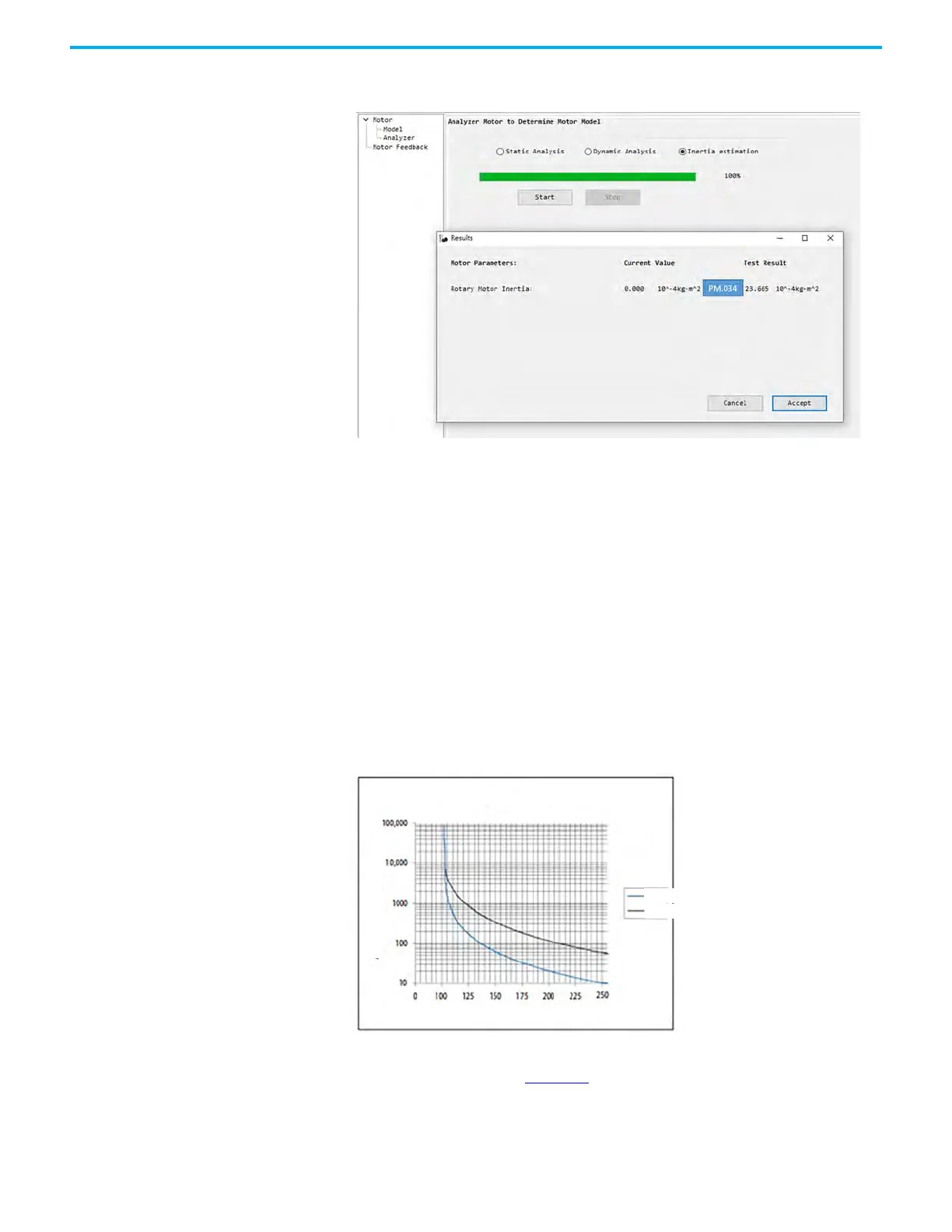
Figure 77 - Motor Overload Curve
The relationship between Motor Overload Factory Limit trip-time and motor
output current is shown in Figure 77
. Hot vs cold is determined by applying a
1st order filter, with a 20 minute time constant, to the output current. The hot
curve corresponds to a filtered output current of 100% or greater rated current.
The cold curve corresponds to a filter output current of 0%.
% Full Load Current
Class 10
Approximate Trip Time (s)
Hot
Cold

 Loading...
Loading...









