358 Rockwell Automation Publication 2198-UM004D-EN-P - December 2022
Chapter 11 Motion Control in PR Mode
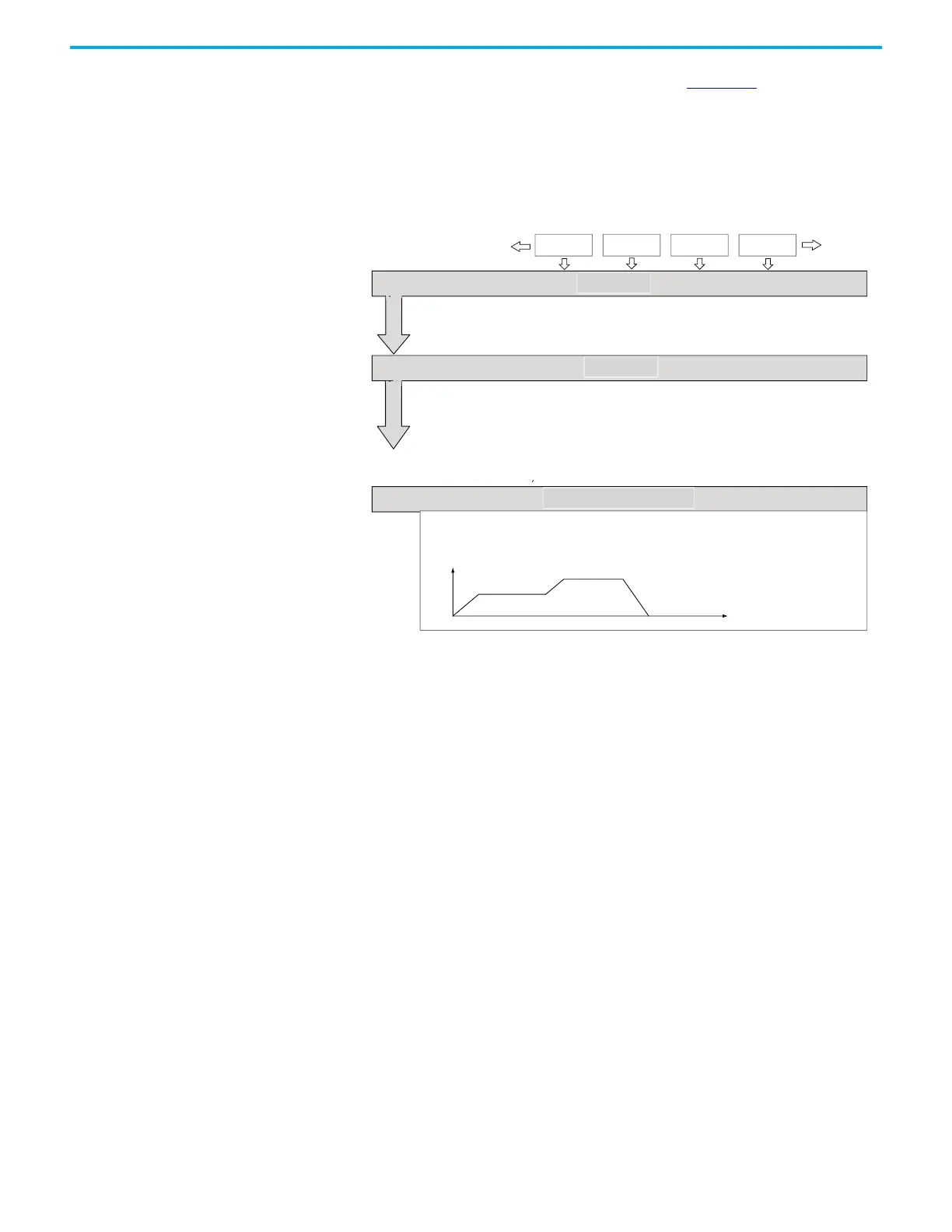
PR Execution Process The drive updates the command status every 1 ms. Figure 167 illustrates the PR
procedure execution flow and how the servo drive deals with PR commands.
Once a PR procedure is triggered, it goes through three internal processing
units, which are PR queue, PR executor, and motion command generator.
Figure 167 - PR Arrangement Procedure of the Drive
Trigger Mechanism Priority
The priority for the triggering methods is the following:
• (1) DI trigger (DI.Command Triggered)
• (2) Explicit Write, PRCmdTrigger parameter ID300 (P5.007)
•(3) DI.Event Trigger 1…4
• (4) Explicit Write, EventRisingEdgePRNumber parameter ID386
(P5.098), EventFallingEdgePRNumber parameter ID387 (P5.099)
A PR is executed as long as a trigger signal is received. When two different
trigger methods are used for one PR procedure within the same ms,
commands with higher priority are executed first. If multiple trigger
commands are generated at the same time (within 1 ms), the last command is
not sent to the PR queue.
High
Low
DI.CTRG P5.007 Event(↑) Event(↓)
PR queue
• Every 1 ms, issues the waiting lead PR to PR executor no matter whether the
executor has completed the commands or not.
• New lead PR replaces the PR in the executor.
PR executor
• Sends the motion commands to the generator (Speed Cmd, Position
Cmd).
•
Completes jump, write, and arithmetic operations commands.
• Within 1 ms, it completes at least 20 consecutive commands with interruption functions
and without delay (If arithmetic operations which cannot be interrupted are
included, duration is determined by the operation time and will be the last
command in 1 ms).
Motion command generator
• Integrates multiple commands (Sequence, interrupt, or overlap commands).
• Output the integrated motion commands.
Time
Speed
Trigger Mechanism Priority
ID300 (P5.007) = PRCmdTrigger
Trigger Mechanism Priority
High
Low
• Every 1 ms, issues the waiting lead PR to PR executor regardless of if the executor has completed
the commands or not.
• New lead PR replaces the PR in the executor.
• Sends the motion commands to the generator (Speed Cmd, Position Cmd).
• Completes jump, write, and arithmetic operations commands.
• Within 1 ms, it completes at least 20 consecutive commands with interruption functions and without
delay
(if arithmetic operations that cannot be interrupted are included, duration is determined by the
operation time and is the last command in 1 ms).
• Integrates multiple commands (Sequence, interrupt, or overlap commands).
• Output the integrated motion commands.
Speed
Time
PR queue
PR executor
Motion command generator

 Loading...
Loading...









