Rockwell Automation Publication 2198-UM004D-EN-P - December 2022 501
Appendix C Use Add-On Instructions
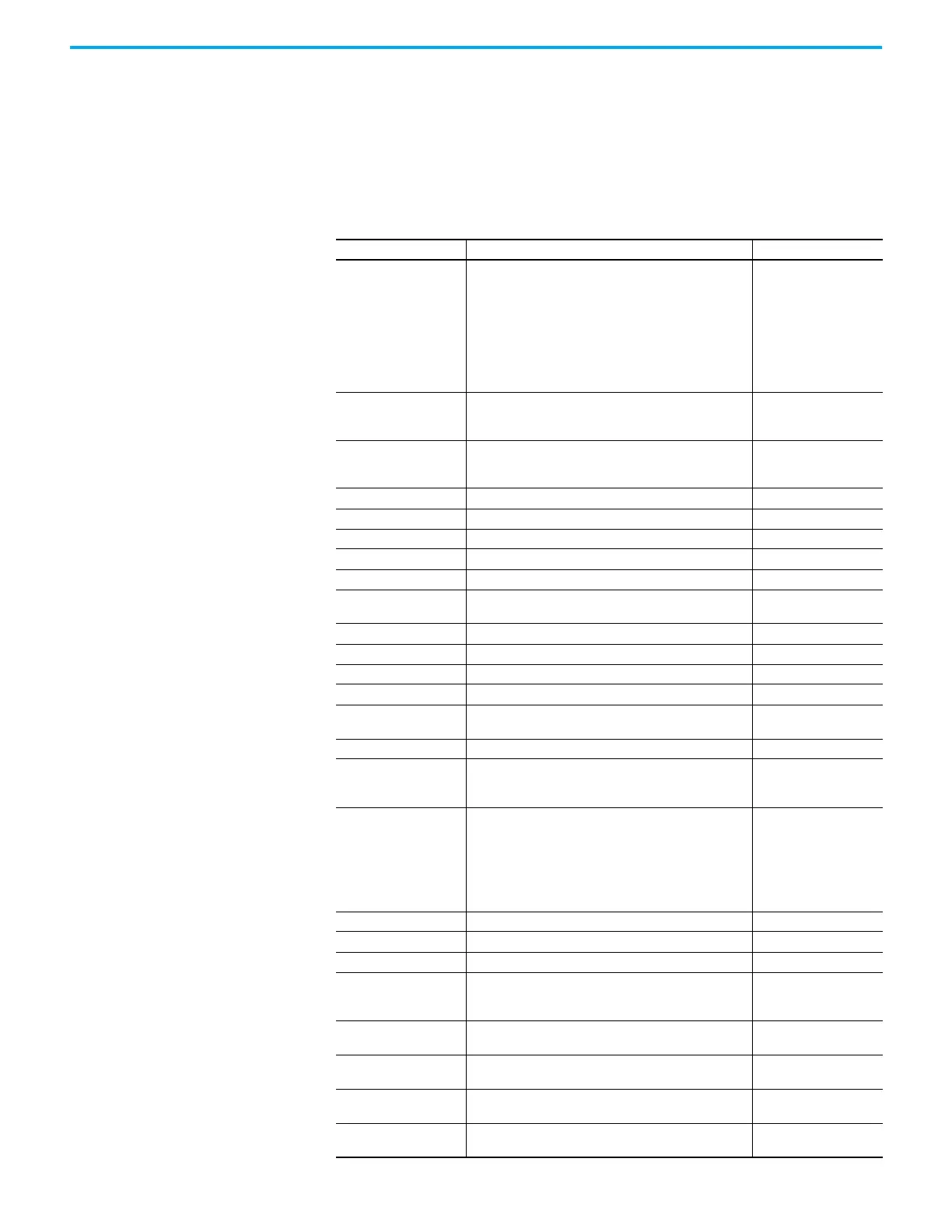
raC_UDT_Itf_K5100_Sts
raC_UDT_Itf_K5100_Sts is the Power Motion Common Control Interface
User-Defined Data Type for device status. Its members provide application
program access to device states, status, and diagnostic data. The table below
shows member names, descriptions, and tag data types.
Table 155 - raC_UDT_Itf_K5100_Sts Data Types
Input Description DataType
eState
Enumerated state value:
0 = Unused
1 = Initializing
2 = Disconnected
3 = Disconnecting
4 = Connecting
5 = Idle
6 = Configuring
7 = Available
DINT
FirstWarning
Capture the First Alarm Bit to trigger. Display the
respective Description and Time Stamp on Faceplate. Log
the same in Event Queue.
raC_UDT_Event
FirstFault
Capture the Fault Code of the device. Display the
respective code, description, and timestamp on faceplate.
Log the same in Event Queue.
raC_UDT_Event
eCmdFail Enumerated command failure code DINT
bSts Status (Bit Overlays) DINT
Physical 1 = Operating as a physical device BOOL
Virtual 1 = Operating as a virtual device BOOL
Connected 1 = PAC to device connection has been established. BOOL
Available
1 = The automation device is available for interaction with
the user program
BOOL
Warning 1 = A warning is active on the automation device BOOL
Faulted 1 = A fault is active on the automation device BOOL
Ready 1 = Device is ready to be Activated BOOL
Active 1 = Device power structure is active BOOL
ZeroSpeed
1 = Motor is within zero speed tolerance (this tolerance is
defined in KNX5100C software)
BOOL
Homed Indicates whether the drive completed the home operation. BOOL
AtReference
Depending on the motion command (position, speed,
torque), AtReference is 1 when the actual reference =
command reference.
BOOL
CommandInProgress
Toggles state when a motion command is active in the
drive. This bit changes state (toggles between 0 and 1)
when a new command is executed from the drive.
IMPORTANT: Once this bit changes state, it remains in that
state for the duration of the command; it toggles to the
opposite state (and remains in that state) once a new
command is received.
BOOL
FaultCode Active Fault Code in the drive DINT
WarningCode Active Warning Code in the drive DINT
OperatingMode Indicate which operating mode is currently used. DINT
MotorType
Indicate which type of motor is connected to the drive.
Rotary Motor = 1
Linear Motor =2 (Future)
DINT
ActualPosition
Actual position of the motor. Units depend on the Cfg
settings. These can be drive counts or Position Units.
REAL
ActualVelocity
Actual speed of the motor. Units depend on the Cfg
settings. These can be 0.1 RPM/sec or Position Units.
REAL
ActualTorque
When the operating mode is 4, Torque Mode, this
represents the % motor torque.
REAL
ActiveIndex
Indicates the currently executing Position Register PR
(index).
DINT

 Loading...
Loading...









