500 Rockwell Automation Publication 2198-UM004D-EN-P - December 2022
Appendix C Use Add-On Instructions
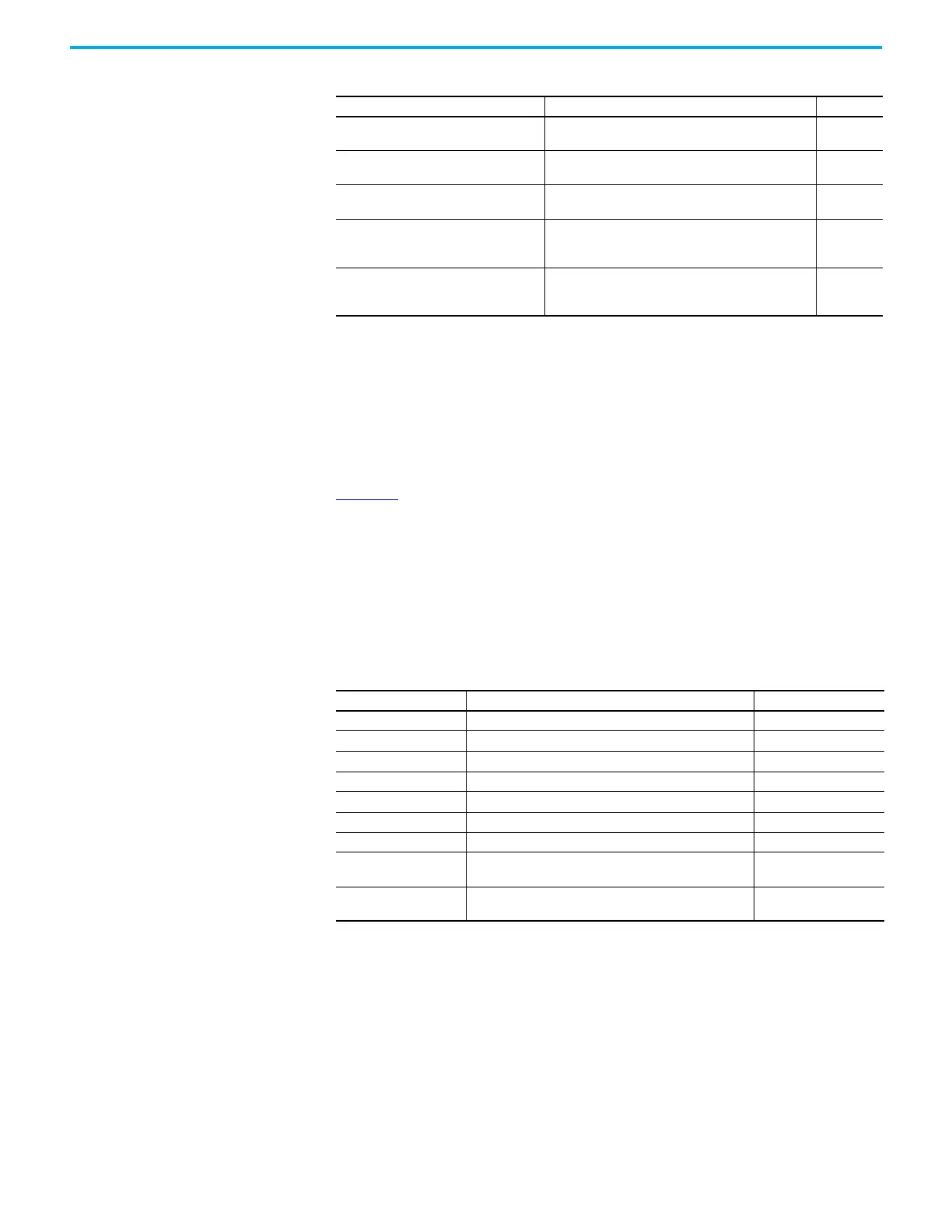
raC_UDT_Itf_K5100_Cmd
raC_UDT_Itf_K5100_Cmd is the Power Motion Common Control Interface
User-Defined Data Type for device commands. Its members provide
application program access to common basic device commands.
Table 154
shows member names, descriptions, and tag data types.
All the commands are available whether operating the device physically or
virtually.
While it is possible, it is not typical to modify any of these UDT values directly.
The Motion Operation Add-On Instructions manipulate these values as a result
of their operation.
CamMasterLeadingCounts
Future: Determines the leading counts (master axis)
before the cam profile is executed.
DINT
CamMasterUnlockCounts
Future: Determines the unlock counts (master axis)
when the cam profile is executed.
DINT
CamMasterCyclicLeadingCounts
Future: Determines the cyclic leading counts (master
axis) during the cam profile is executed.
DINT
GearRatioSlaveCounts
Integer value representing slave counts. This value is
P1.044 Gear Ratio Follower Counts from the E-Gear ratio
in KNX5100C software.
DINT
GearRatioMasterCounts
Integer value representing master counts. This value is
P1.045 Gear Ratio Master Counts from the E-Gear ratio
in KNX5100C software.
DINT
Table 154 - raC_UDT_Itf_K5100_Cmd Data Types
Member Description DataType
bCmd Commands (Bit Overlay) DINT
Physical 1 = Operate as a physical device BOOL
Virtual 1 = Operate as a virtual device BOOL
ResetWarn 1 = Reset device warning BOOL
ResetFault 1 = Reset device trip or fault BOOL
Activate 1 = Activate Output Power Structure BOOL
Deactivate 1 = DeActivate Output Power Structure BOOL
StartMotion
A zero-to-one transition means the motion command is
issued from the external controller.
BOOL
StopMotion
A zero-to-one transition will stop any active motion
command in the drive.
BOOL
Table 153 - raC_UDT_Itf_K5100_Set Data Types (Continued)
Member Description DataType

 Loading...
Loading...









