Rockwell Automation Publication 2198-UM004D-EN-P - December 2022 77
Chapter 3 Connector Data and Feature Descriptions
Safe Torque Off Feature Kinetix 5100 servo drives have Safe Torque Off (STO) capability and can safely
remove inverter power when the STO signals are removed, resulting in Stop
Category 0 behavior.
2198-Exxxx-ERS (hardwired) servo drives support parallel input connections
for cascading additional drives. For applications that do not require the STO
safety capability, you must install jumper wires to bypass the safe torque-off
feature.
Refer to Safe Torque Off Feature
on page 416 for the STO connector pinout,
installation, and wiring information.
Operation Modes The Kinetix 5100 servo drive supports three basic modes of operation: Position,
Speed, and Torque. You can switch between these modes by using Dual or
Multi mode selections. IO Mode uses a Class 1 Ethernet/IP connection with a
Logix Controller.
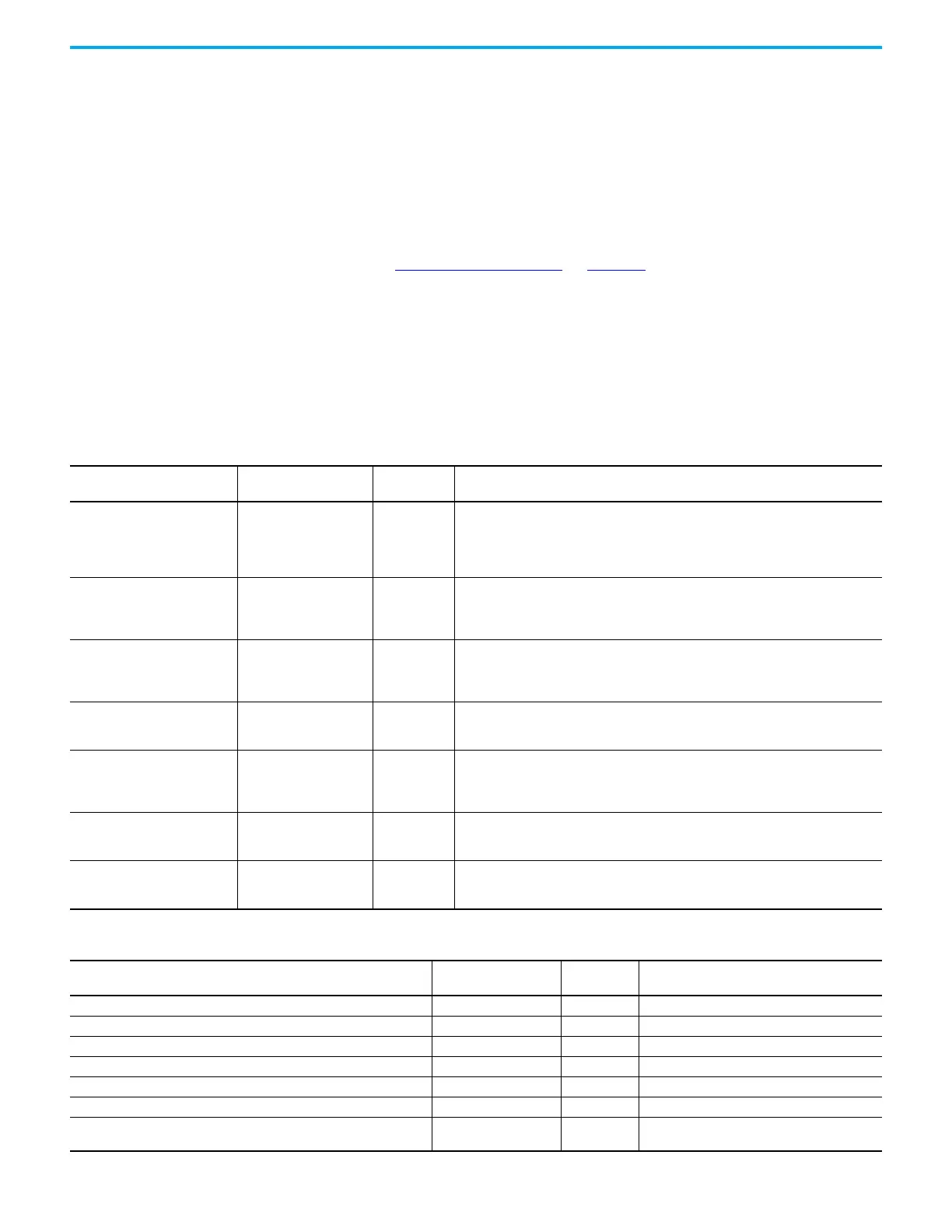
Table 42 - Single Mode
Mode Mode Abbreviation Code Description
Position mode
(I/O terminal block input)
PT 00
This mode is sometimes referred to as Pulse Train Output or Step and Direction. The
servo drive receives the Position command and commands the motor to run to the target
position. The Position command is communicated through the I/O terminal block and the
signal type is pulse. You can configure this mode for pulse-pulse following, which is a
form of gearing.
Position mode
(register input)
PR 01
The servo drive receives the Position command and commands the motor to run to the
target position. Position commands are issued from the program registers (99 sets in
total). You can select the register number with binary-weighted Digital Input (DI) signals
or through communication.
Speed mode S 02
The servo drive receives the Speed command and commands the motor to run at the
target speed. The Speed command is issued from the internal registers (3 sets in total) or
by analog voltage (-10V…+10V) that is communicated through the I/O terminal block. You
can select the command with binary-weighted DI signals.
Speed mode
(no analog input)
Sz 04
The servo drive receives the Speed command and commands the motor to run at the
target speed. The Speed command can only be issued from the internal registers (3 sets
in total). You can select the command with binary-weighted DI signals.
Torque mode T 03
The servo drive receives the Torque command and commands the motor to run with the
target torque. The Torque commands can be issued from the internal registers (3 sets in
total) and by analog voltage (-10V…+10V) that is communicated through the I/O terminal
block. You can select the command with binary-weighted DI signals.
Torque mode
(no analog input)
Tz 05
The servo drive receives the Torque command and commands the motor to run with the
target torque. The Torque command can only be issued from the internal registers (3 sets
in total). You can select the command with binary-weighted DI signals.
IO mode IO OC
The servo drive receives commands from the Logix controller through the EtherNet/IP
network connection. Commands are issued through the Add-On Instruction in the Logix
Designer application.
Table 43 - Dual Mode
Mode Mode Abbreviation Code Description
Position mode PT (I/O terminal block input) and Speed mode PT-S 06 Switches PT and S mode with DI signals.
Position mode PT (I/O terminal block input) and Torque mode PT-T 07 Switches PT and T mode with DI signals.
Position mode PR (register input) and Speed mode PR-S 08 Switches PR and S mode with DI signals.
Position mode PR (register input) and Torque mode PR-T 09 Switches PR and T mode with DI signals.
Speed mode and Torque mode S-T 0A Switches S and T mode with DI signals.
––0BReserved
Position mode PT (I/O terminal block input) and Position mode PR (register
input)
PT-PR 0D Switches PT and PR Mode with DI signals.

 Loading...
Loading...









