Rockwell Automation Publication 2198-UM004D-EN-P - December 2022 411
Chapter 13 Kinetix 5100 Safe Torque Off (STO) Feature
Refer to the ISO 13849-1, IEC 61508, and IEC 62061 standards for complete
information on requirements for PL and SIL determination.
Description of Operation The Safe Torque Off (STO) feature provides a method, with sufficiently low
probability of failure, to force the power-transistor control signals to a disabled
state. When disabled, or any time power is removed from the safety enable
inputs, all of the drive output-power transistors are released from the ON-
state. This results in a condition where the drive performs a Category 0 Stop.
Disabling the power transistor output does not provide mechanical isolation of
the electrical output that is required for some applications.
For hardwired control of the safe torque-off function, the appropriate wiring
must be connected to the Safety connector plug. Refer to Safe Torque Off
Specifications on page 418 for more information on the safety inputs.
Under normal operation, the safe torque-off inputs are energized. If an STO
fault is detected, then all of the output power transistors turn off. The safe
torque-off response time is less then 20 ms.
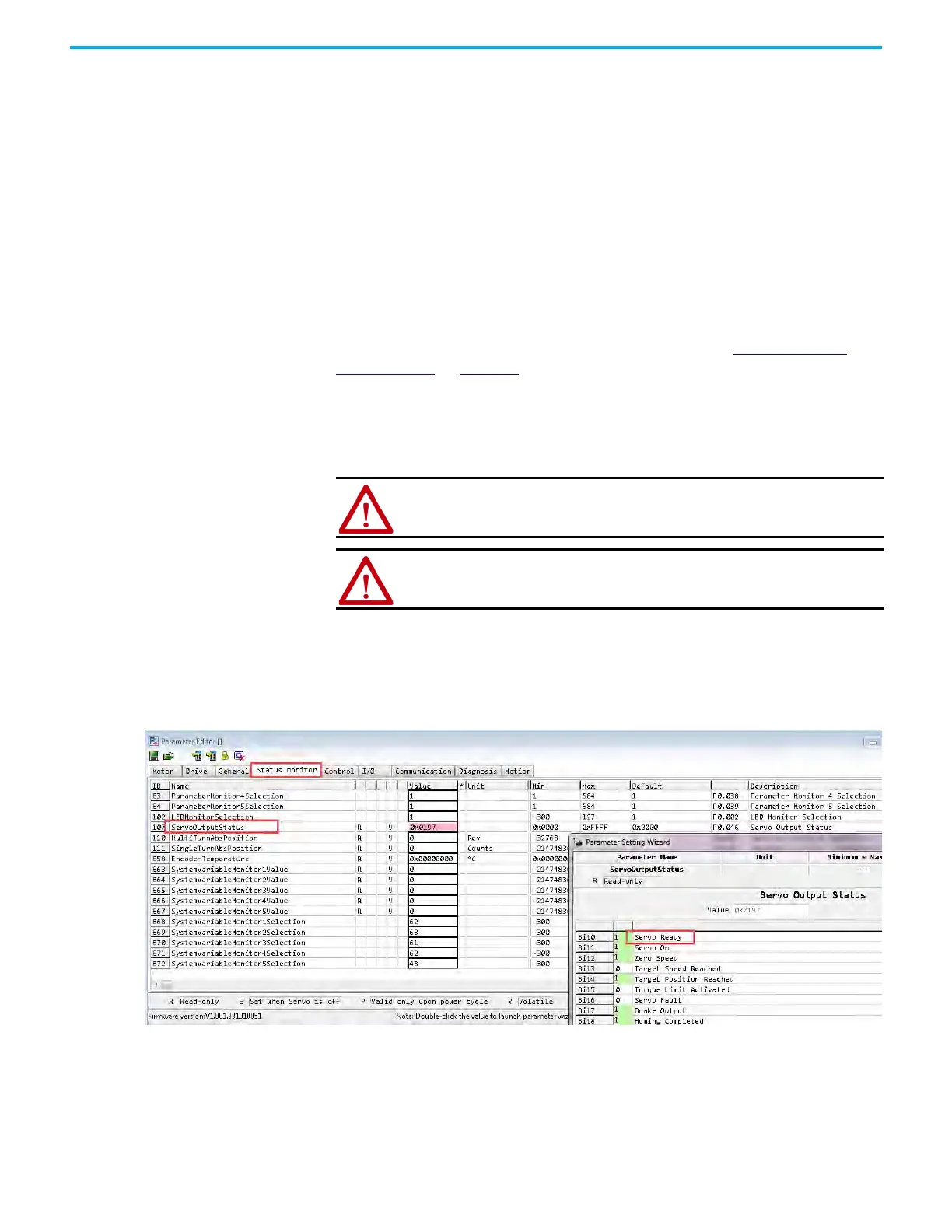
The ServoOutputStatus parameter represents various drive status values. Bit 0
(Servo Ready) is used to indicate the status of the Safe Torque Off inputs. This
bit can be monitored in KNX5100C software.
Figure 218 - ServoOutputStatus Parameter Setting
ATTENTION: Permanent magnet motors can, in the event of two
simultaneous faults in the IGBT circuit, result in a rotation of up to 180
electrical degrees.
ATTENTION: If either of the safety enable inputs are de-energized for more
than 1 second, or both inputs are in the OFF state simultaneously for more
than 10 ms, a fault condition results.

 Loading...
Loading...









