388 Rockwell Automation Publication 2198-UM004D-EN-P - December 2022
Chapter 12 Motion Control Applications
Master Axis Signal Source
When using an electronic cam, you must first determine the source of the
master axis, which can be an auxiliary encoder (via Aux Port), another Kinetix
5100 motor (via PT wiring), or time (ms). The source is determined by
parameter ID376 (P5.088.Y) ECamControl.
• Auxiliary Encoder - ID376 (P5.088
.Y) = 1, the external encoder signal from
the Aux Feedback Connector (AUX) is used as the source of the master
axis signal. And the master axis position is monitored with ID309
(P5.017) AuxEncoderPosition.
• Pulse Input - ID376 (P5.088
.Y) = 2, the pulse input from the I/O connector
is used as the source of the master axis signal. And the master axis
position is monitored with ID310 (P5.018) PulseCmdPosition.
• Time Axis (1ms) - ID376 (P5.088
.Y) = 4, the 1ms pulse generated internally
by the servo drive is used as the source of the master axis signal.
You can monitor the master axis by using parameter ID374 (P5.086).
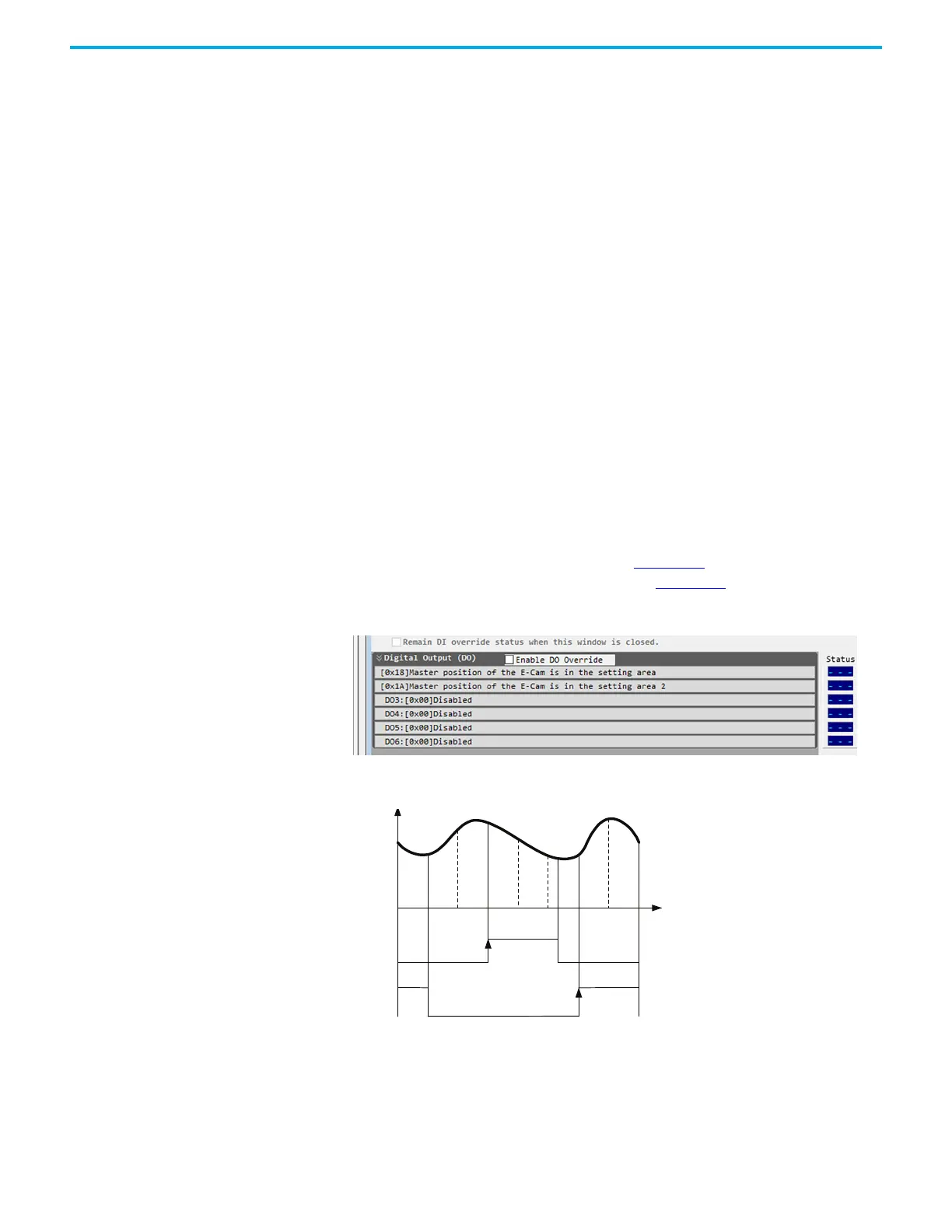
Digital Output CAM_Area Settings
The Kinetix 5100 drive provides two digital outputs that can operate based on
the present Master position within the E-CAM cycle. The first DO (0x18) ON
transition is determined by Ecam DO.Cam xxxx Rising Edge Angle ID378
(P5.090) and the OFF transition is determined by Ecam DO.Cam xxxx Falling
Edge Angle ID379 (P5.091), as illustrated in Figure 196
. The second DO (0x1A) is
operated in a similar manner and is shown in Figure 197
.
Figure 195 - Digital Output CAM Area
Figure 196 - Digital Output 1 - Engagement Timing
Slave axis position (PUU)
E-Cam angle ()
04590135180225 270
315
360
DO: 0x18
DO: 0x18
≤
ID378 (P5.090) = 135
ID379 (P5.091) = 240
ID379 (P5.091)
ID379 (P5.091) = 45
ID378 (P5.090)
ID378 (P5.090) = 270
ID378 (P5.090) > ID379 (P5.091)
Slave axis position (PUU)

 Loading...
Loading...









