236 Rockwell Automation Publication 2198-UM004D-EN-P - December 2022
Chapter 10 Modes of Operation
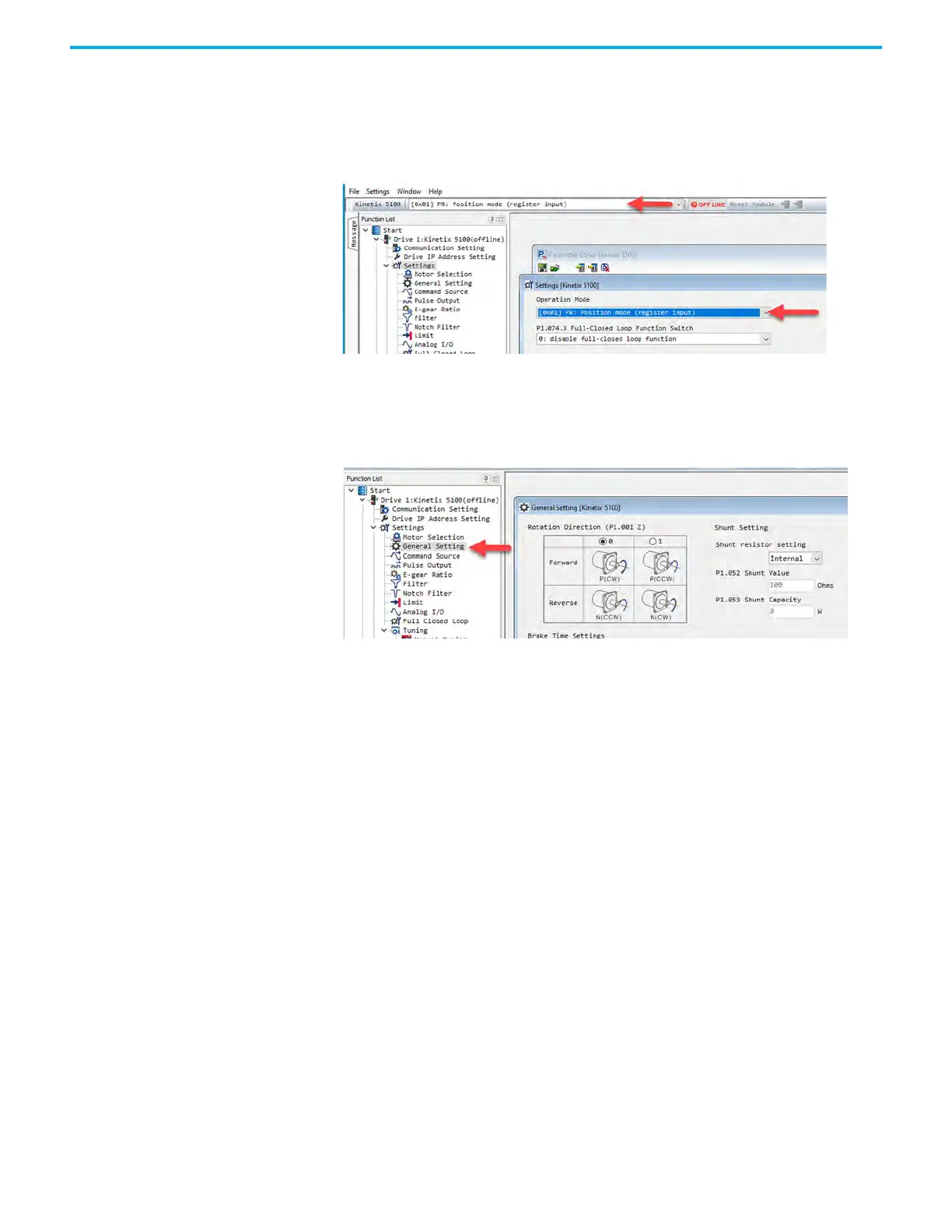
Change Operation Mode by using KNX5100C Software
From Function List > Settings, use the pull-down menu to select your new
drive operating mode or select the mode from the top status bar next to the
Offline/Online status.
Change the Motor Rotation Polarity by using KNX5100C Software
From Function List > Settings > General Setting, choose the direction that
represents your desired direction of rotation.
Position Control Three input modes for position control are available on the drive: External
pulse or analog input (PT Mode), internal register (PR Mode) and IO Mode.
In PT Mode, the servo drive is able to receive either analog (+/- 10V analog
input) used to position or pulse commands that represent position step and
motor direction. The drive can handle an input pulse rate up to 4 MHz.
In PR Mode (Position Register) the drive's indexing and program capabilities
are used. The drive provides 99 command registers and these position registers
are executed in one of two ways:
• Using standalone PR operation mode.
- Pre-program the program registers (up to 99 individual registers)
- Enable the drive
- Use DIPOS0…DIPOS6 signals on the I/O connector to represent the
binary weighted PR number to execute
- Execute the PR commands using the DI Command Triggered
- You can directly set the register values via communication

 Loading...
Loading...









