182 Rockwell Automation Publication 2198-UM004D-EN-P - December 2022
Chapter 7 Configure the Drive with KNX5100C Software
Configure Position,
Velocity, and Current Loops
The Operation Mode selection dictates which control loops are active and that
you can modify. Each dialog box lets you configure the parameters for the gain
and filter values that correspond to the command type.
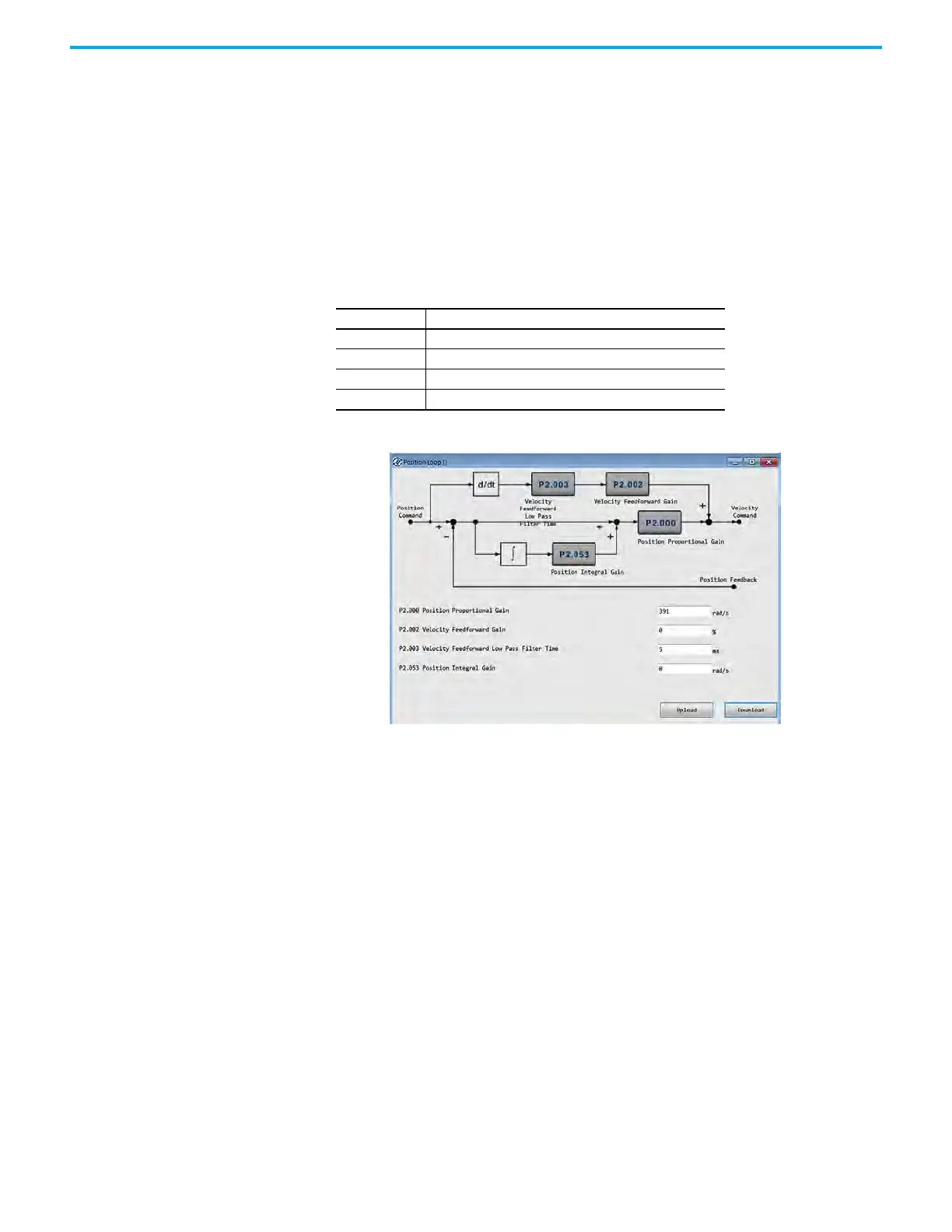
Configure Position Loop
From the Function List, choose Position Loop to view or change the
parameters that apply to the position command.
Click Download to download any changed parameters to the servo drive.
Table 73 - Position Loop Parameters
Parameter Name
ID185 (P2.000) PositionProportionalGain
ID187 (P2.002) VelocityFeedforwardGain
ID188 (P2.003) VelocityFeedforwardLowPassFilterTimeConstant
ID235 (P2.053) PositionIntegralGain

 Loading...
Loading...









