Rockwell Automation Publication 2198-UM004D-EN-P - December 2022 181
Chapter 7 Configure the Drive with KNX5100C Software
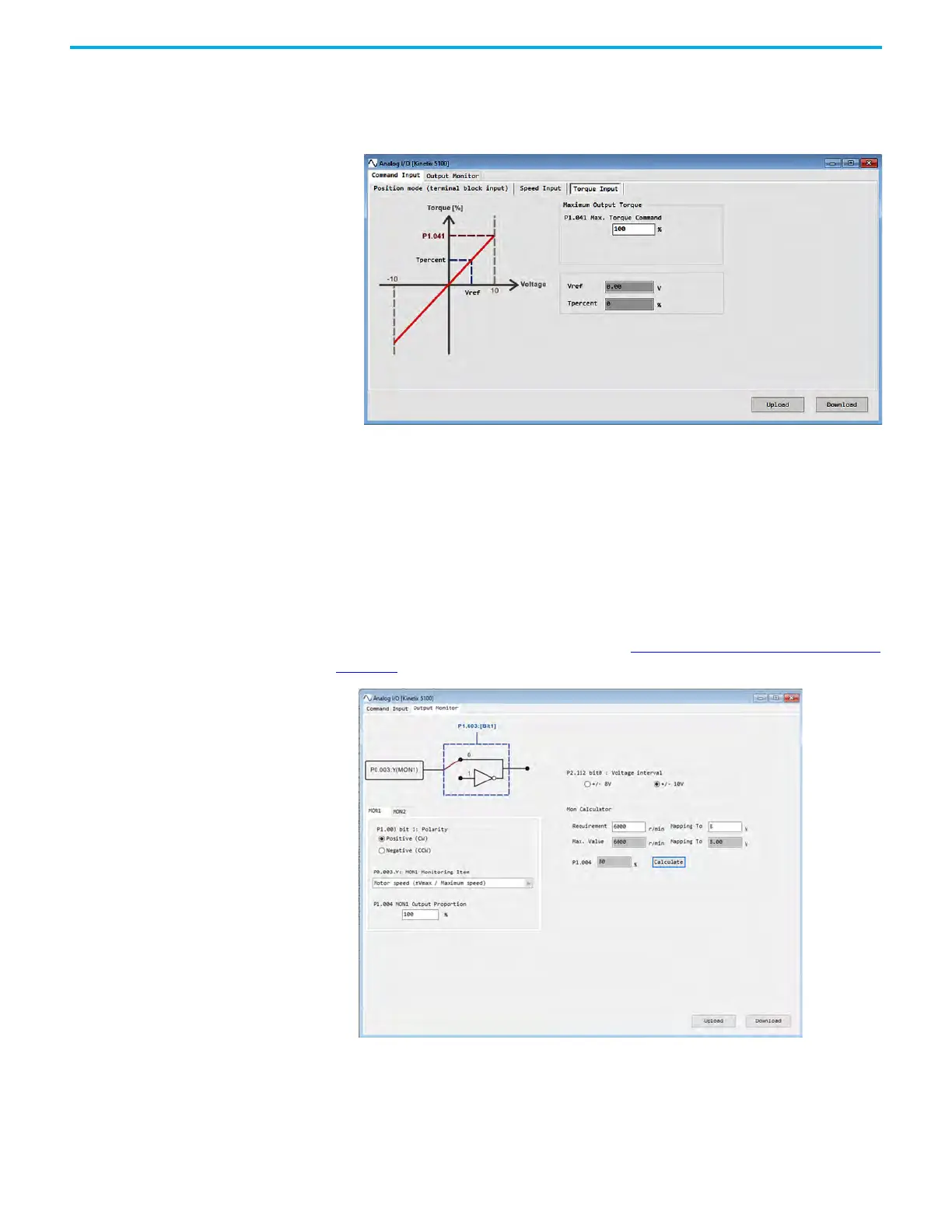
On this tab, you can change the maximum output torque command by using
parameter ID148 (P1.041).
Click Download to write any changed parameters to the servo drive.
Output Monitor Tab
On the Output Monitor tab, you can change the Monitored Value using a pull-
down menu. You can change the scaling, proportion, and the polarity of the
output.
The Mon Calculator lets you enter a unique Motor Speed (can be the maximum
Motor Speed) with your desired Analog Voltage at that speed. Click Calculate
to determine the corresponding Maximum values and analog scaling
ID120 (P1.004). For more information, see Analog Outputs and Monitoring
on
page 282.

 Loading...
Loading...









