Rockwell Automation Publication 2198-UM004D-EN-P - December 2022 271
Chapter 10 Modes of Operation
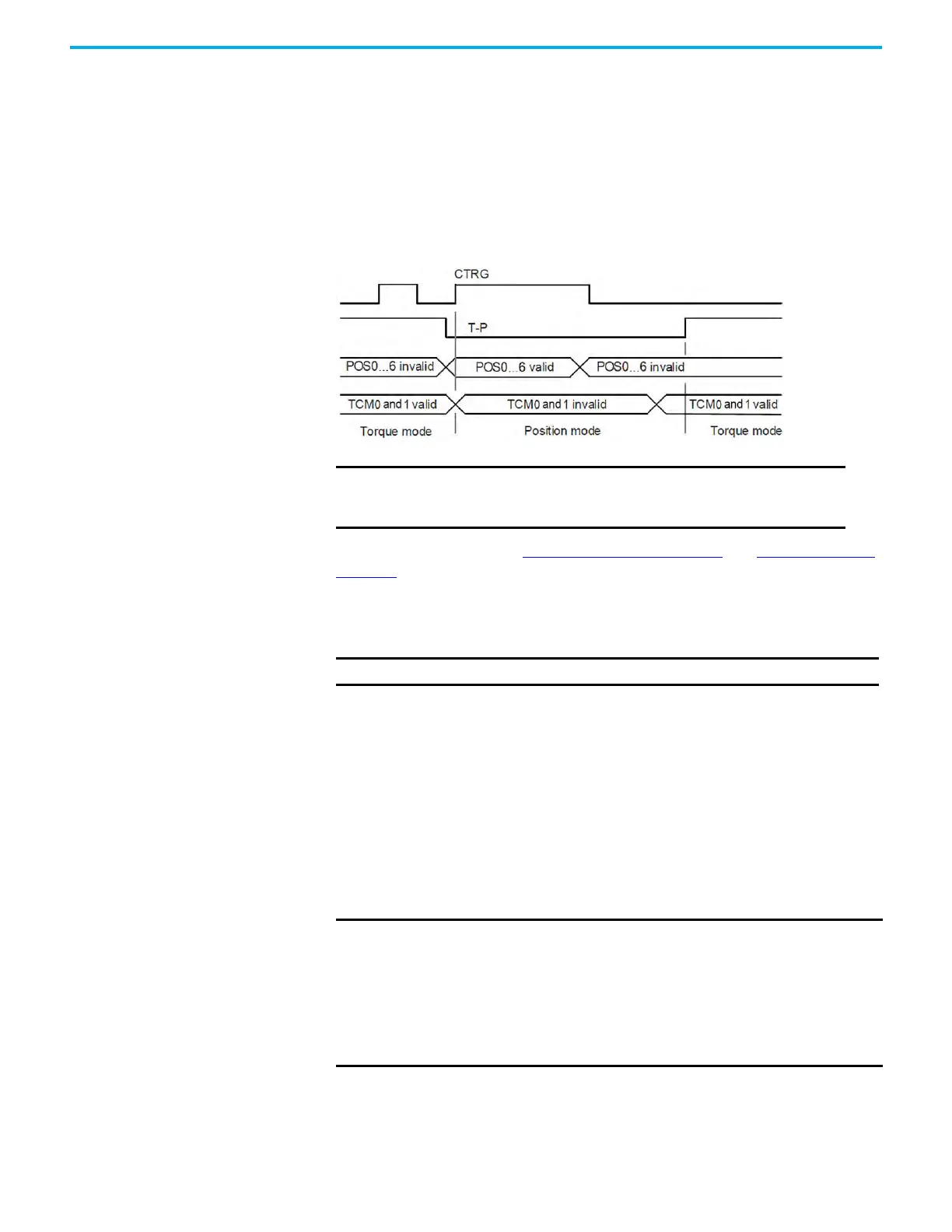
Torque/Position Dual Mode
The timing chart below shows the behavior of the dual mode operation when
switching from Torque mode into Position Mode.
• CTRG (Digital Input = CmdTriggered)
• T-P (Digital Input = Torque/Position modes selection,
0 = Torque, 1 = Position)
• POS0…POS6 indicates a valid binary-weighted PR is selected
• TCM0/1 indicate that the preset torque registers are valid
For more information, see Position Control
on page 236 and Torque Mode on
page 252.
IO Mode
When the Kinetix 5100 Operating Mode is configured as IO Mode, the
operation and status of the drive comes from a Logix controller capable of a
Class 1 Ethernet/IP connection. An example of this operation is a
CompactLogix controller (for example, a 1769-L18). This controller uses
Studio 5000 Logix Designer® application for programming with a Kinetix 5100
drive pre-defined Add-On Profile to exchange data between the drive and
controller.
When the Kinetix 5100 is using IO Mode, Class 3 explicit messaging cannot be
used for that particular drive.
IMPORTANT
When modes are changed dynamically, the change to the control
loops are immediate. Care must be used so speed/torque limits
do not exceed application requirements.
IMPORTANT The induction and linear motors are not supported in IO Mode.
IMPORTANT
Although the Kinetix 5100 drive uses Motion Add-On Instructions to
program and an Add-On Profile (AOP) that looks similar to the Integrated
Motion on Ethernet/IP (CIP) drives, the Kinetix 5100 drive does not
function the same way. The Kinetix 5100 drive is a standard I/O device
on an Ethernet/IP network. It does not operate in the Motion Group and
does not use the motion group for synchronization. The Kinetix 5100
drive operates as a Class 1 I/O device on an Ethernet/IP network. This is
not a CIP Motion drive.

 Loading...
Loading...









