272 Rockwell Automation Publication 2198-UM004D-EN-P - December 2022
Chapter 10 Modes of Operation
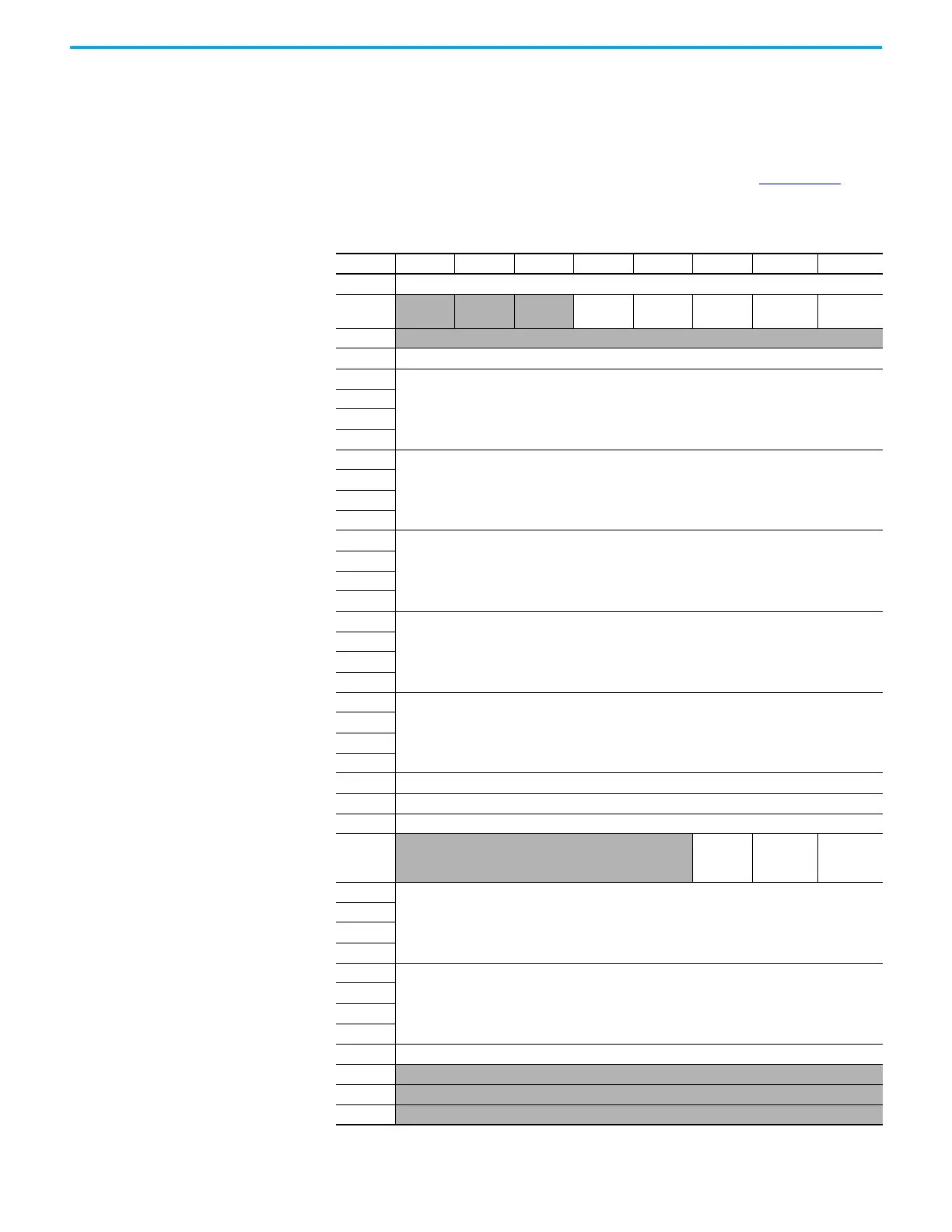
The Input and Output assembly are shown for your convenience. While you
can directly manipulate these assemblies, they rely on your logic to operate
correctly, including timing, pre-existing drive conditions, and so on. It is
typical to use the pre-defined Motion Operation Add-On Instructions to
perform motion operations. These instructions contain interlocks and
condition checking to facilitate the programming effort. See Appendix C
for
instruction details.
Table 102 - Kinetix 5100 Output Assembly Data (Instance 104)
Byte Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
0Operating Mode
1
Start
Motion
Fault Reset
Stop
Motion
Servo Off Servo On
2
3 Homing Method
4
Speed Reference (DINT)
5
6
7
8
Accel Reference (DINT)
9
10
11
12
Decel Reference (DINT)
13
14
15
16
Position Reference (DINT)
17
18
19
20
Home Return Speed (DINT)
21
22
23
24 Non-cyclic Move Type
25 Cyclic Move Type
26 Travel Mode
27
Captured
Position
Select
Position
Command
Overlap
Position
Command
Override
28
Torque Reference (DINT)
29
30
31
32
Torque Ramp Time (DINT)
33
34
35
36 Starting Index
37
38
39

 Loading...
Loading...









