522 Rockwell Automation Publication 2198-UM004D-EN-P - December 2022
Appendix C Use Add-On Instructions
raC_xxx_K5100_MAT
(1)
The Motion Axis Torque (raC_xxx_K5100_MAT) instruction lets you use torque
limiting while a pre-defined speed is used to move the motor. The first time the
pre-defined torque limit is reached, the Sts_TorqueReached bit is set. While
the Sts_TorqueReached bit is set, the MAT operation remains active until it is
terminated by an raC_xxx_K5100_MAS (Motion Axis Stop)/MSF (Motion Servo
Off), or a drive fault. The torque and speed entries are bi-directional.
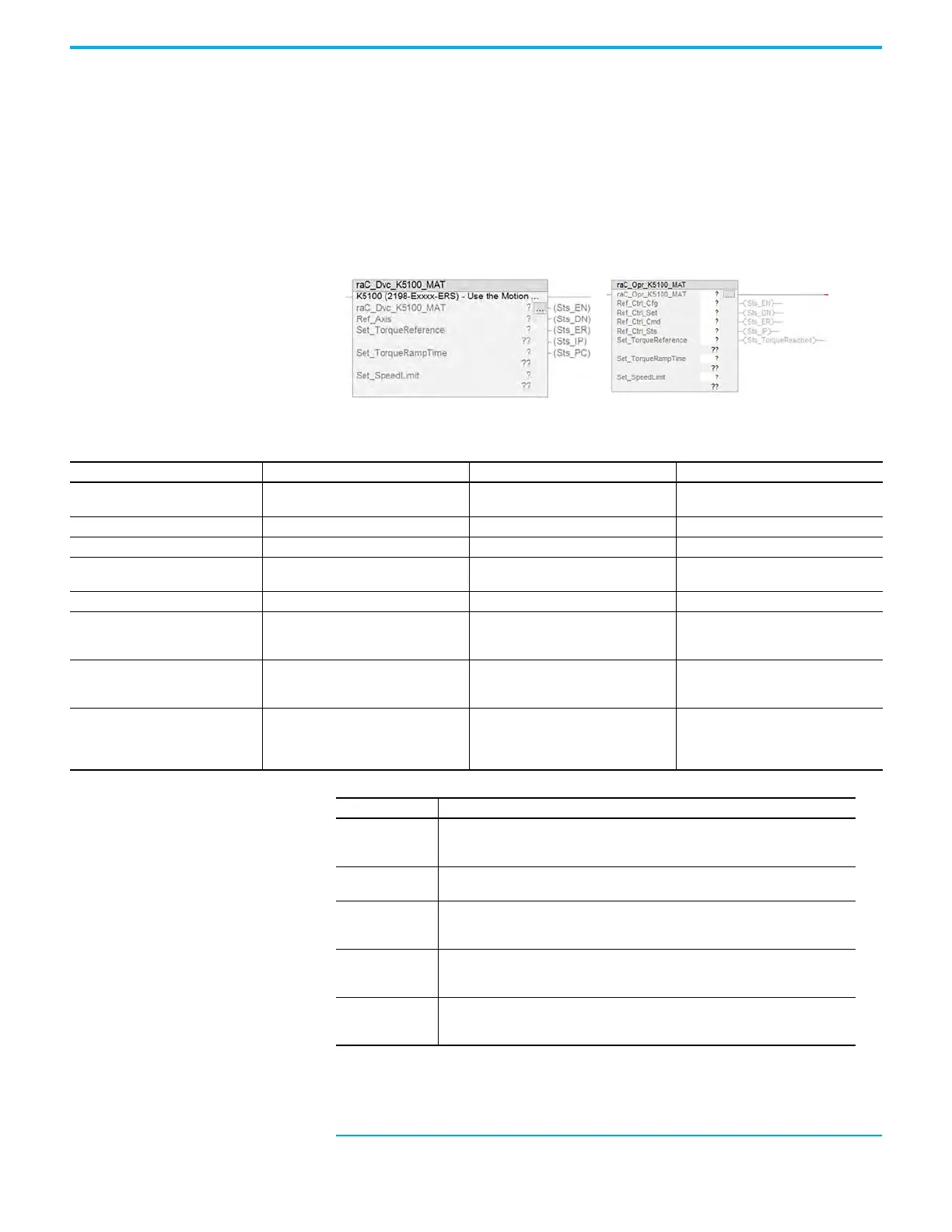
Figure 272 - MAT Ladder Diagram
Operands
(1) The xxx in the name can be Dvc (legacy applications) or Opr (new applications).
Operand Type Format Description
Instance raC_xxx_K5100_MAT Tag
Unique instance of the MAT Add-On
Instruction
Ref_Ctrl_Cfg raC_UDT_Itf_PowerMotionSA_Cfg Tag Interface for Ctrl_Cfg of the Device Object
Ref_Ctrl_Set raC_UDT_Itf_PowerMotionSA_Set Tag Interface for Ctrl_Set of the Device Object
Ref_Ctrl_Cmd raC_UDT_Itf_PowerMotionSA_Cmd Tag
Interface for Ctrl_Cmd of the Device
Object
Ref_Ctrl_Sts raC_UDT_Itf_PowerMotionSA_Sts Tag Interface for Ctrl_Sts of the Device Object
Set_TorqueReference DINT Immediate or Tag
The limited value of motor torque, in the
unit of 0.1% of the motor rated torque.
Range: -4000…+4000
Set_TorqueRampTime DINT Immediate or Tag
Torque Ramp Time, the time (ms) it takes
to ramp up from 0 to the
TorqueReference. Range: 1…65500
Set_Speedlimit REAL Immediate or Tag
Speed limit that is used during the
constant torque operation: unit is 0.1 rpm
for rotary motor. Range: -
80,000…+80,000
Mnemonic Description
Sts_EN (Enable)
This bit is set when the rung makes a false-to-true transition and remains set as the
message transaction to execute the MAT is initiated and in process. It remains high
until the rung-in condition is false and no faults are active.
Sts_DN (Done)
This bit is set when the rung makes a false-to-true transition and the message
transaction to the drive (Sts_EN) is complete.
Sts_ER (Error)
This bit is set when the rung makes a false-to-true transition and there is an error that
has occurred with the instruction. (This instruction error can be a result of a fault on
the drive itself). See Sts_ERR for details on the cause of the error.
Sts_IP (In Progress)
This bit is set when the rung makes a false-to-true transition, the MAT message
transaction is successful, and the motor begins to move. This bit remains set while the
MAT operation is active.
Sts_PC (Process
Completed)/
Sts.TorqueReached
This bit is set when the rung makes a false-to-true transition, the Sts_IP is set, and the
Set_TorqueReference value is reached. This bit is set (and remains set) on the first
occurrence of this condition.

 Loading...
Loading...









