Rockwell Automation Publication 2198-UM004D-EN-P - December 2022 521
Appendix C Use Add-On Instructions
Operands
Error Codes
• 100 - Kinetix 5100 drive is not ready
• 101 - Kinetix 5100 drive is faulted
•103 - raC_xxx_K5100_MSF is running
• 105 - Drive is disabled
•107 - raC_xxx_K5100_MAS is executing
• 108 - Other motion Add-On Instruction is sending the command
• 111 - SpeedReference is out of range
• 112 - AccelReference is out of range
• 113 - DecelReference is out of range
• 122 - HomingMethod is out of range
• 127 - Previous command has not completed
• 129 - Motor is not connected
See Error Codes
on page 524 for details.
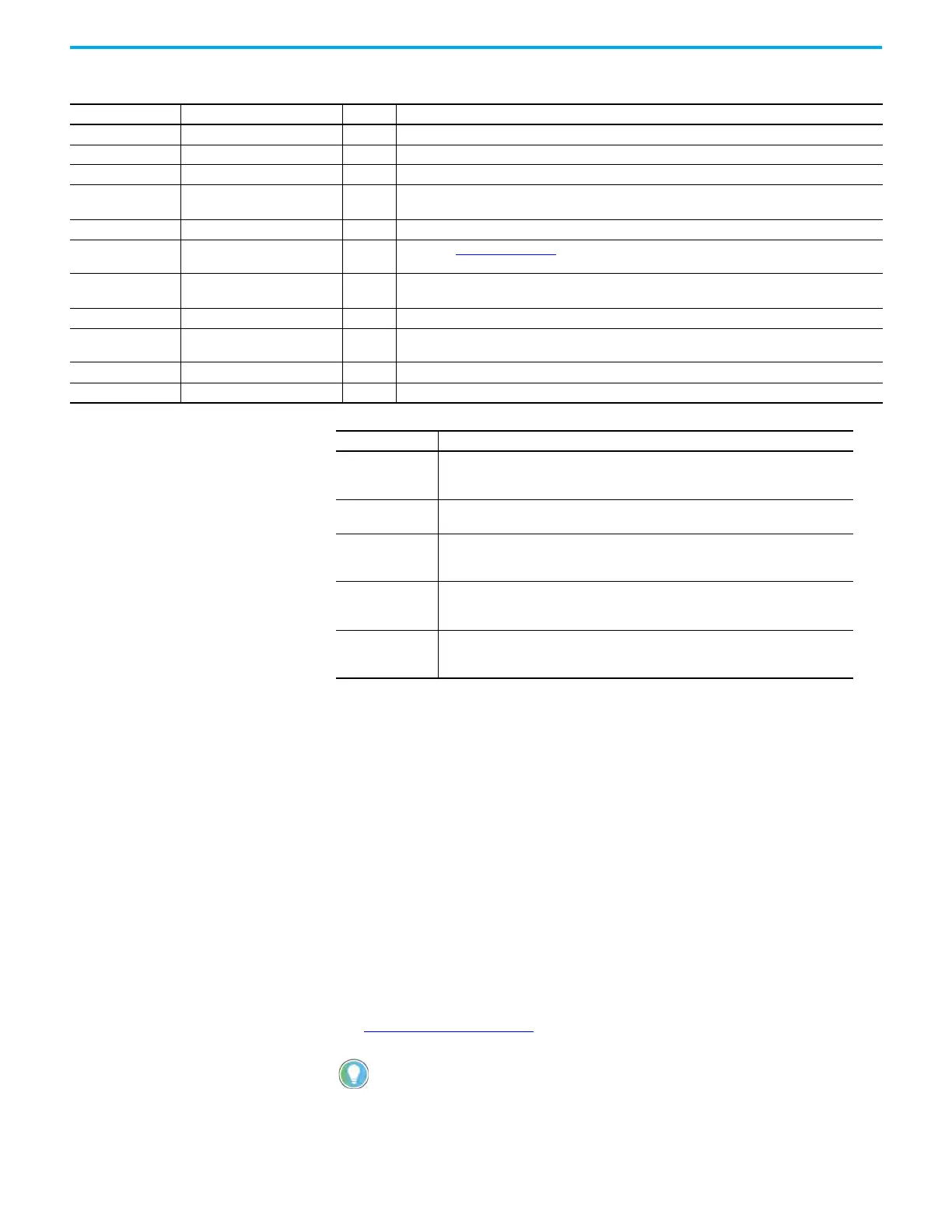
Operand Type Format Description
Instance raC_xxx_K5100_MAH Tag Unique instance of the MAH Add-On Instruction
Ref_Ctrl_Cfg raC_UDT_Itf_PowerMotionSA_Cfg Tag Interface for Ctrl_Cfg of the Device Object
Ref_Ctrl_Set raC_UDT_Itf_PowerMotionSA_Set Tag Interface for Ctrl_Set of the Device Object
Ref_Ctrl_Cmd
raC_UDT_Itf_PowerMotionSA_Cm
d
Tag Interface for Ctrl_Cmd of the Device Object
Ref_Ctrl_Sts raC_UDT_Itf_PowerMotionSA_Sts Tag Interface for Ctrl_Sts of the Device Object
Set_HomingMethod SINT Tag
0…38 - See Table 112 on page 301
for Homing methods.
TIP: You can press F1 to see the Homing Methods from the Add-On Instructions help.
Set_PositionReferenc
e
REAL Tag The feedback position when a homing procedure is completed. Range: -2,147,483,648…+2,147,483,647
Set_SpeedReference REAL Tag The first (high) speed reference. Units are 0.1 rpm for rotary motors. Range: 1…20,000
Set_HomeReturnSpee
d
REAL Tag The second (low) speed reference. Units are 0.1 rpm for rotary motors. Range: 1…5000
Set_AccelReference REAL Tag Units are 0.1 rpm/s for rotary motors. Range: 458…30,000,000
Set_DecelReference REAL Tag Units are 0.1 rpm/s for rotary motor. Range: 458…30,000,000
Mnemonic Description
Sts_EN (Enable)
This bit is set when the rung makes a false-to-true transition and the message
transaction to Home is initiated and in process. It remains high until the rung-in
condition is false and no faults are active.
Sts_DN (Done)
This bit is set when the rung makes a false-to-true transition and the message
transaction to Home the drive (Sts_EN) is complete.
Sts_ER (Error)
This bit is set when the rung makes a false-to-true transition and there is an error that
has occurred with the instruction. (This instruction error can be a result of a fault on
the drive itself). See Sts_ERR for details on the cause of the error.
Sts_IP (In Process)
This bit is set when the rung makes a false-to-true transition, the Home message
transaction is successful, and the homing begins. This bit remains set if the homing is
executing.
Sts_PC(Process
Complete)
This bit is set when the rung makes a false-to-true transition and the Homing
Sequence is completed. Once homing is successfully completed, the CtrlSts.Homed bit
= 1.
You can use the F1 key to view fault error codes.

 Loading...
Loading...









