Rockwell Automation Publication 2198-UM004D-EN-P - December 2022 73
Chapter 3 Connector Data and Feature Descriptions
Motor Feedback Supported by Using the MFB Connector
The Kinetix 5100 drive accepts motor feedback signals from Hiperface, Nikon,
Tamagawa, and TTL incremental encoders on the MFB connector.
The selected motor determines if the motor thermostat connections (MTR_TS)
are used.
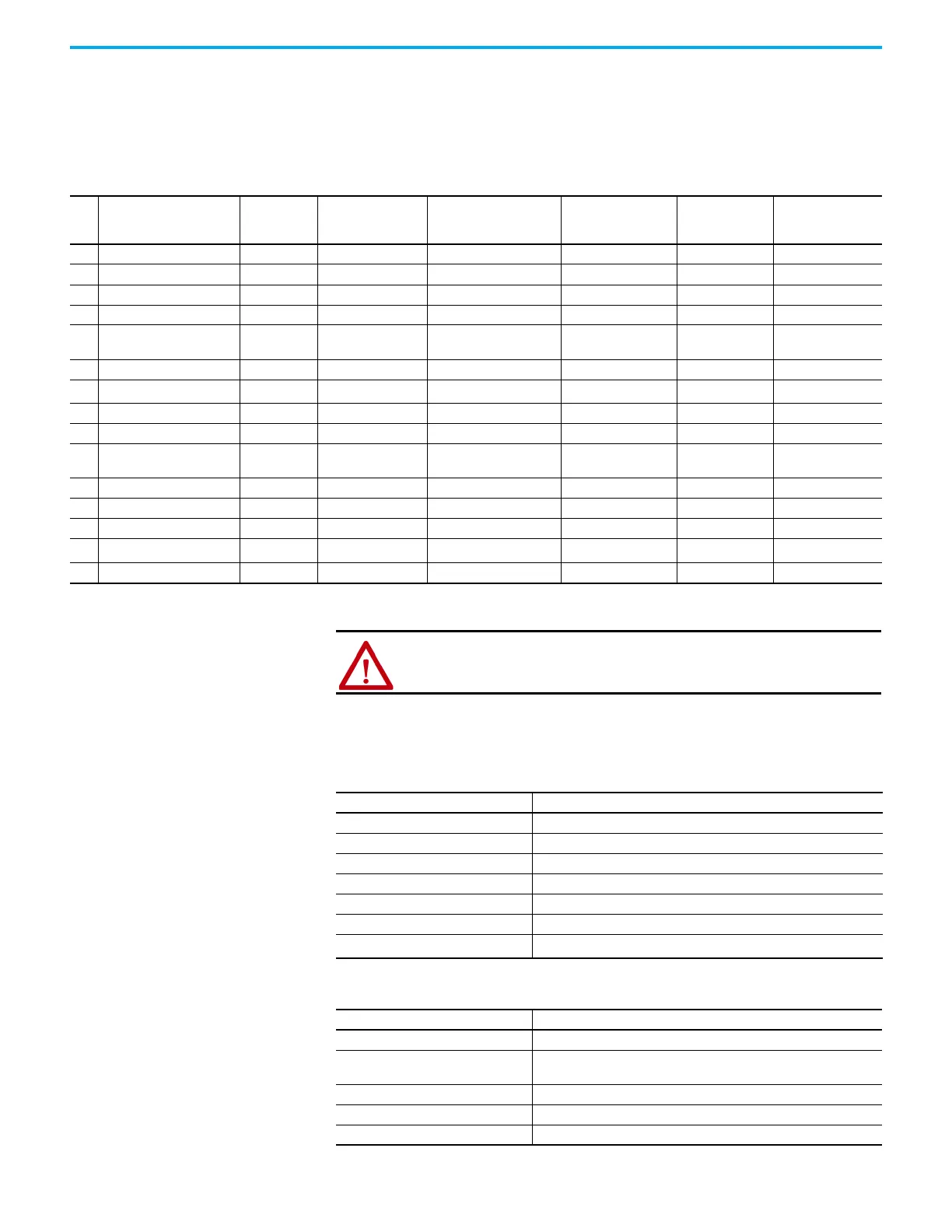
Table 34 - Feedback Signals by Device Type
Pin
Hiperface
(all compatible motors
and actuators)
Nikon
(Kinetix TLP)
Tamagawa
(Kinetix TL/TLY-B)
Digital AqB with UVW
(all compatible motors
and actuators)
Incremental
(Kinetix TLY-H)
Generic TTL
Incremental
Generic Sine/Cosine
1 MTR_SIN+ – – MTR_AM+ MTR_AM+ MTR_AM+ MTR_SIN+
2 MTR_SIN– – – MTR_AM– MTR_AM– MTR_AM– MTR_SIN–
3 MTR_COS+ – – MTR_BM+ MTR_BM+ MTR_BM+ MTR_COS+
4 MTR_COS– – – MTR_BM– MTR_BM– MTR_BM– MTR_COS–
5 MTR_DATA+ MTR_T+
MTR_DATA+ (TLY-B)
MTR_SD+ (TL-B)
MTR_IM+ MTR_IM+ MTR_IM+ MTR_IM+
6 MTR_ECOM MTR_ECOM MTR_ECOM MTR_ECOM MTR_ECOM MTR_ECOM MTR_ECOM
7
MTR_EPWR9V
(1)
–– – – – –
8 – – – MTR_S3 MTR_S3 MTR_S3 MTR_S3
9– – – – – – –
10 MTR_DATA– MTR_T–
MTR_DATA– (TLY-B)
MTR_SD– (TL-B)
MTR_IM– MTR_IM– MTR_IM– MTR_IM–
11 MTR_TS – – – – MTR_TS MTR_TS
12 – – – MTR_S1 MTR_S1 MTR_S1 MTR_S1
13 – – – MTR_S2 MTR_S2 MTR_S2 MTR_S2
14
MTR_EPWR5V
(1)
MTR_EPWR5V MTR_EPWR5V MTR_EPWR5V MTR_EPWR5V MTR_EPWR5V MTR_EPWR5V
15 – – – – – – –
(1) Determine which power supply your encoder requires and connect to that supply only. Do not make connections to both supplies.
ATTENTION: The motor feedback determines which encoder power source
is used. Be sure you use the correct power source for your encoder to avoid
equipment damage.
Table 35 - Hiperface Encoder Specifications
Attribute Value
Protocol Hiperface
Memory support Encoders programmed with Allen-Bradley motor data
Hiperface data communication RS-485, 9600 communication, 8 data bits, no parity
Sine/Cosine interpolation 2048 counts/sine period
Input frequency (AM/BM) 250 kHz, max
Input voltage (AM/BM) 0.6...1.2V, p-p, which is measured at the drive inputs
Line loss detection (AM/BM)
Average (sin
2
+ cos
2
) > constant
Table 36 - Nikon Encoder Specifications
Attribute Value
Communication protocol Proprietary format
Encoder nonvolatile memory usage
Programmed with Kinetix TLP motor data as Allen-Bradley memory
format
Differential input voltage 1.0…7.0V
Data communication 8 Mbps, 21 data bits with ECC, no parity
Battery type 3.6V, ER14252 or equivalent, 1/2AA size

 Loading...
Loading...









