connector. Auxiliary feedback connections are made by using the auxiliary
feedback (AUX) connector. These examples illustrate how you can use the
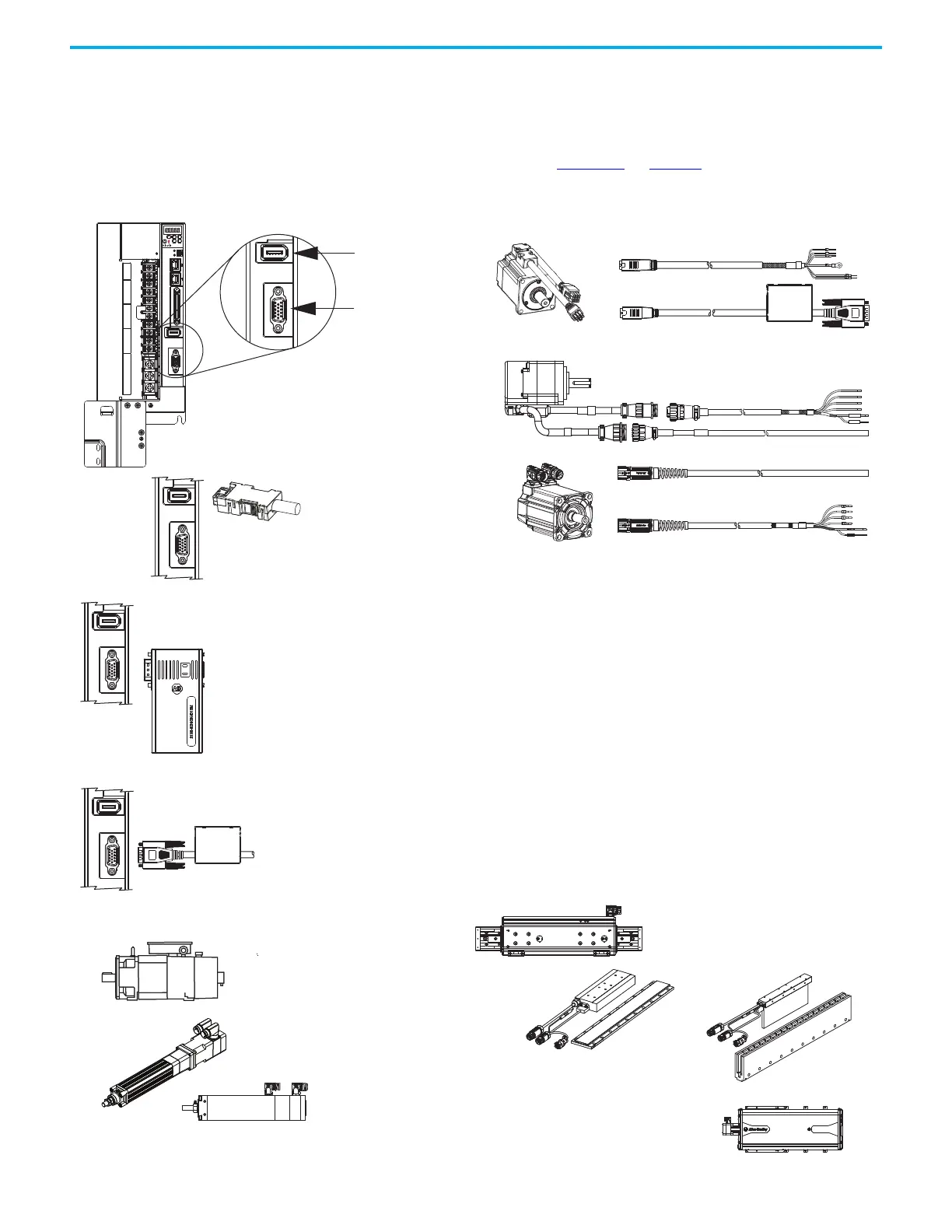
Bulletin 2198 connector kits for making these connections. To see motor power
2198-AUXKIT Auxiliary Feedback Connector Kit
Accepts Digital AqB incremental encoder feedback (TTL).
Application uses:
• Load feedback (PT Mode, dual loop)
• Master feedback (PR Mode, used as E-CAM command source)
10-pin Auxiliary Feedback
(AUX) Connector
15-pin Motor Feedback
(MFB) Connector
2198-K51CK-D15M Motor Feedback Connector Kit
Accepts multiple encoder feedback types and provides battery-backup for multi-turn position data:
• Hiperface high-resolution absolute multi-turn and single-turn encoders
– Kinetix MPL-A/Bxxx-S/M, MPM-A/Bxxx-S/M, MPF-A/Bxxx-S/M, MPS-A/Bxxx-S/M servo motors
– Kinetix MPL-A/Bxxx-E/V servo motors
• Nikon (24-bit) high-resolution serial encoder
– Kinetix TLP-Axxx-xxx-D servo motors
• Tamagawa (17-bit) high-resolution serial encoder
– Kinetix TL-AxxxP-B servo motors
– Kinetix TLY-AxxxP-B servo motors
Kinetix 5100 Servo Drive
(2198-E2055-ERS drive is shown)
2090-CFBM7Dx and 2090-CPxM7DF
Motor Feedback and Power Cables
Kinetix MP Motors and Actuators
(MPL-Bxxxx motor is shown)
2090-CTFB-MxDD and 2090-CTPx-MxDF
Motor Feedback and Power Cables
2090-CFBM6Dx and 2090-CPxM6DF
Motor Feedback and Power Cables
Kinetix TLP Motors
(TLP-A100 motor is shown)
Kinetix TL/TLY Motors
(TLY-A110 motor is shown)
2090-CTFB-MxDD Feedback Cable
Provides battery-backup for multi-turn position data:
• Nikon (24-bit) high-resolution serial encoder
–Kinetix TLP-A/Bxxx-xxx-D servo motors
Battery
Box
• Digital AqB (TTL) encoders with UVW (incremental)
–MPL-A/B15xxx-H, MPL-A/B2xxx-H, MPL-A/B3xxx-H,
MPL-A/B4xxx-H, MPL-A/B45xxx-H rotary motors
–Kinetix TLY-Axxxx-H servo motors
LDAT-Sxxxxxx-xBx
Linear Thrusters
Kinetix MPAS Linear Stages
(MPAS-B9xx
x ballscrew linear stage
is shown)
Kinetix MPAI Heavy-duty Electric Cylinders
(MPAI-B3xxxx heavy-duty electric cylinder is shown)
Induction Rotary Motors
• Closed loop
• Incremental encoder feedback
LDC-Series Linear Motors
(LDC-Cxxxxxxx linear motor shown)
LDL-Series Linear Motors
(LDL-xxxxxxxx linear motor shown)

 Loading...
Loading...









