288 Rockwell Automation Publication 2198-UM004D-EN-P - December 2022
Chapter 11 Motion Control in PR Mode
PR Mode Definitions
When an individual PR is selected (Figure 99, step ) and the dialog box appears
(Figure 99
, step ) in KNX5100C software. The TYPE selection chooses which
OPTION values that are visible.
Some of the Options shown are only visible when the TYPE is selected.
PR Command Setting
If you need to read/write the PR Command (including indexing) Setting
values, the decoding of these hex values is shown below.
You can use an external controller capable of Class 3 Ethernet/IP messaging to
perform explicit read/writes for changing the index settings, which involves
changes to the control setting. This parameter ID399 (P6.002) for PR1 contains
a High and Low word that can be changed from Hex into Decimal. This section
shows how to ‘decode’ the settings so you can change any indexing value.
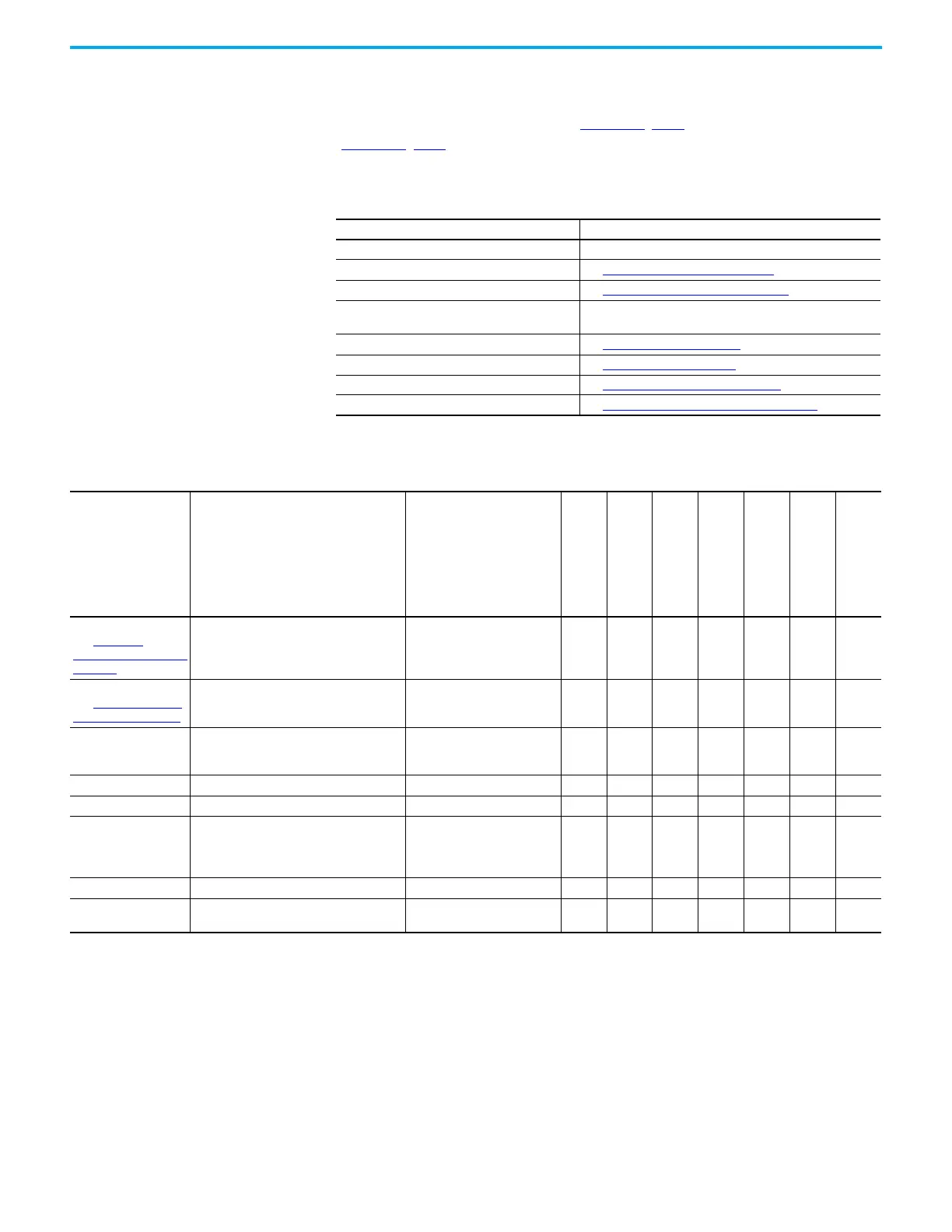
Table 109 - PR Mode Definitions - Part 1
Type Description
[0] NA —
[1] Constant speed control See Constant Speed Control
on page 324
[2] Point-to-Point Command See Position Control Command on page 326
[3] Point-to-Point Command
(Proceed to the next command when completed)
—
[7] Jump to the specified command See Jump Command on page 329
[8] Write to Parameters or Data Array See Write Command on page 331
[0xA] Index Position Control See Index Position Command on page 333
[0xB] Statement See Arithmetic Operation Commands on page 339
Table 110 - PR Mode Definitions - Part 2
OPTIONS SEMANTICS DESCRIPTION
Constant Speed Control
Point to Point
Command
Point to Point (proceed
to next)
Jump to specified
command
Write to parameters/
data array
Index Position Control
Statement
Interrupt previous PR
See Command
Interrupts Execution on
page 363
0=NO, 1=YES
When this PR is executed, it will
interrupt (stop) any currently
executing PR
XXXXXXX
Overlap Next PR
See Overlap Command
Execution on page 369
0=NO, 1=YES
Will overlap the next PR with
the currently executing PR
XX X
AUTO 0=NO, 1=YES
Automatically load the next PR
cmd when the current PR cmd
completes
XXX
UNIT 0=0.1 RPM, 1= PPS (PUU/sec) X
Speed factor 0=0.1RPM, 1=0.01RPM X
CMD: Position command
types
00: Absolute Position
01: REL Relative Position
02: INC Incremental Position
03: CAP High Speed Position Capturing
X
Direction 0=forward, 1=reverse, 2=shortest direction X
ROM 0=NO, 1=YES
Write to EERPOM when
uploading a parameter
X

 Loading...
Loading...









